INTRODUÇÃO
As pessoas com deficiência estão em destaque hoje. Leis e legislação abrangente são criadas todos os dias para tornar nosso meio ambiente mais humano. E vários projetos de lei estão sendo elaborados para garantir que essa inclusão se estenda em todas as direções. E uma das leis mais importantes é a Lei da Situação da Pessoa com Deficiência, Lei nº 13.146, de 6 de julho de 2015. E este projeto é mais uma luz na inclusão de nossos irmãos brasileiros.
A execução de todo o trabalho consiste na criação de um guarda-roupa com tecnologia voltada para inclusão de pessoas com deficiências físicas. A tecnologia proposta no projeto é mais sofisticada do que as tecnologias existentes no mercado, pois existem guarda-roupas para deficientes físicos, mas nenhum dos projetos possuem uma tecnologia de acionamento automático comandada por celular ou por botões como neste projeto, a maioria utiliza um varão onde o usuário puxa essa barra fazendo com que a haste do cabideiro desça até a altura desejada.
Através da comunicação Bluetooth, a pessoa deficiente física poderá acionar através do seu smartphone por um aplicativo que foi desenvolvido para a plataforma Android, os comandos de movimentação da haste do cabideiro. Em casos, que o usuário não possui um smartphone ou não ter o acesso momentâneo a ele, ela poderá fazer esse acionamento manualmente, através dos botões alocados na coluna central do próprio guarda-roupa, os botões terão informações autoexplicativas de seu funcionamento, para que o usuário não encontre dificuldades em fazer os acionamentos de modo correto, e tudo automatizado visando a acessibilidade de portadores de necessidades especiais (PNE).
REVISÃO HISTÓRICA
A Indústria 4.0 inicia uma nova era no desenvolvimento das tecnologias aplicadas à produção, sendo considerada a quarta revolução industrial. Para entender sua origem, é preciso refletir sobre as transformações que a indústria passou ao longo do tempo. A indústria 1.0 foi a primeira revolução, ocorrida no final do século XVIII, foi impulsionada pela invenção da máquina a vapor, que permitiu a transição de um modelo de produção artesanal para um sistema de fábricas em larga escala. No início do século XX, a segunda revolução trouxe a eletrificação e a produção em massa, especialmente com a famosa linha de montagem de Henry Ford, que otimizou a produção e aumentou a eficiência.
Na terceira revolução industrial, que começou nas últimas décadas do século XX, a automação e a digitalização ganharam destaque. A chegada dos computadores e sistemas controlados por software trouxe uma nova flexibilidade e integração para os processos de produção, permitindo uma maior eficiência. Foi nesse cenário que, em 2011, surgiu o conceito de Indústria 4.0, na Alemanha, com o objetivo de criar uma “indústria inteligente”. A ideia era integrar as tecnologias mais inovadoras aos processos produtivos, tornando as fábricas mais autônomas e eficientes. Nesse novo modelo, tecnologias como sistemas cibernéticos, Internet das Coisas (IoT), big data e inteligência artificial passaram a se integrar aos processos, conectando máquinas e pessoas e criando um ambiente de produção mais inteligente e interligado.
Com a chegada da Indústria 4.0, os avanços tecnológicos são mais rápidos e complexos, criando uma rede interconectada de máquinas, produtos e pessoas, que podem se comunicar e tomar decisões sozinhas. Esse novo cenário não só transforma a maneira como os produtos são fabricados, mas também altera a interação entre empresas e consumidores. Estamos vivendo em um momento em que a inteligência artificial e a automação se tornam protagonistas da produção, trazendo tanto oportunidades quanto desafios para o mercado de trabalho e para a sociedade como um todo.
OBJETIVO GERAL
O objetivo deste projeto foi desenvolver um guarda roupa automatizado, para melhorar a autonomia de pessoas com deficiência motora e dificuldade de mobilidade, permitindo o acesso a alguns afazeres do dia-a-dia, sem a necessidade da ajuda de terceiros, dando uma independência ao usuário, como o simples fato de escolher uma roupa para vestir-se e poder pega-la com mais facilidade. Através do uso de periféricos tecnológicos, como por exemplo, utilizar um aplicativo para smartphone, selecionando um dos cabideiros disponíveis do guarda roupa pela tela do celular, assim saindo automaticamente o cabideiro selecionado pelo usuário, facilitando para que o usuário possa pegar a peça de roupa desejada, com muito menos esforço.
OBJETIVOS ESPECÍFICOS
DESENVOLVIMENTO
Como auxílio para os projetos voltados à Tecnologia Assistiva, a ABNT(Associação Brasileira de Normas Técnicas), possui uma NBR(Normas Brasileiras) chamada NBR 9050, cuja sua versão mais atualizada se encontra no ano de 2020. Esta norma define os padrões de Acessibilidade a edificações, mobiliário, espaços e equipamentos urbanos, visando sempre proporcionar à maior quantidade possível de pessoas, independentemente da limitação de mobilidade, percepção, estatura ou idade, a utilização de maneira autônoma e segura do ambiente, sendo eles edificações, espaços, mobiliário ou equipamentos urbanos.
Figura 1- Alcance Manual Frontal com a superfície de trabalho
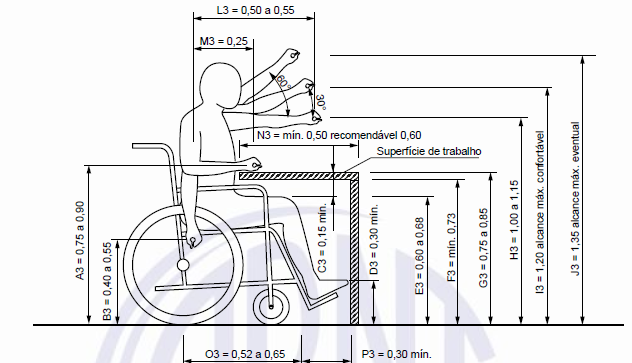
Fonte: NBR9050 2020
Estudos feitos pela norma ABNT NBR 9050 -2020, cita que as cadeiras de rodas são limitadas para execução de alguns movimentos que podem ser perigosos, seja na aproximação de objetos, assim como ao acessar objetos acima ou abaixo do raio de uma pessoa sentada. O deslocamento possível se reduz entre 0,80m e 1,00m, e o cabide automatizado deve ser rebaixado obedecendo esta restrição para que possa manipular e acessar as roupas de forma confortável(Figura 1).
Ao redor da cadeira de roda deve ter no mínimo uma altura de liberdade de 0,73m entre o piso e a parte inferior do guarda roupa . O piso e sua superfície superior devem medir de 0,75m a 0,85m. Como pode ser exemplificado pela figura 2 da norma ABNT NBR 9050:2020.
Figura 2- Áreas de Alcance em Superfícies de Trabalho – Vista Horizontal
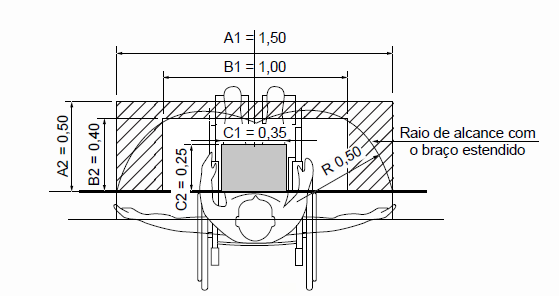
Fonte: NBR 9050 2020
Como pode ser visto na figura 2, a norma recomenda que os comandos acessíveis aos portadores de necessidades especiais fiquem há uma altura mínima de 0,40 m do piso e tenham a altura limite máxima de 1,20 m.
A montagem do projeto do guarda roupa deve ser acessível para o público cadeirante, e os comandos adotados para os puxadores das portas devem ficar a uma altura entre 0,80 m e 1,10 m, pegando como base na tabela a maçaneta de porta.
Figura 3 – Altura dos comandos permitidos em norma.
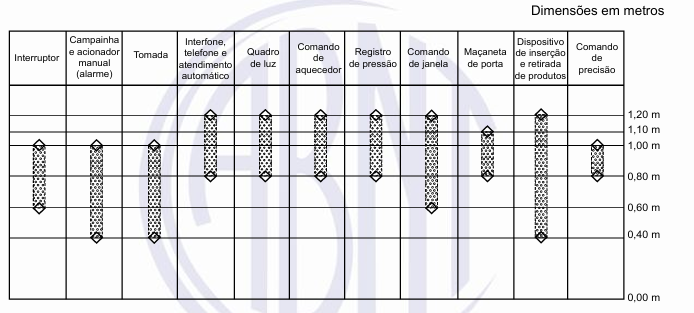
Fonte: NBR 9050 2020
MONTAGEM ELETRÔNICA DO PROJETO
Será usado o microcontrolador Arduino Uno devido a sua facilidade de programação e custo, e o mesmo utiliza linguagem C++, pois é um meio de programação mais próxima à humana, de fácil manipulação e é muito utilizado hoje em dia devido às diversas plataformas oferecidas para se programar. Esta programação pode ser em diagrama de blocos(Figura 4) ou texto.
Figura 4 – SEQ Figura \* ARABIC 1 – Diagrama de Blocos

Fonte: Elaboração do autor, 2025
O Arduino é uma plataforma de microcontrolador com código aberto, e que torna sua aplicação mais acessível e prática para projetos em diversas áreas. Ele foi desenvolvido para ser uma ferramenta aberta e simples, baseada em um microcontrolador Atmel AVR de 8 bits, embora versões mais recentes contem com o poderoso Atmel ARM de 32 bits. O conjunto Arduino inclui tanto o hardware quanto o software, que utiliza uma linguagem de programação padrão e um bootloader, ambos rodando diretamente no microcontrolador. Com essa estrutura, o Arduino facilita o desenvolvimento de projetos, permitindo que pessoas de diferentes níveis de experiência explorem a eletrônica de forma intuitiva (MCROBERTS, 2015, p.17).
A comunicação utilizada será o bluetooth. Um meio muito utilizado hoje em dia, que realiza a troca de diversos arquivos entre múltiplos dispositivos. Utilizaremos deste meio para fazer a comunicação de um smartphone com o Arduino, dando ao deficiente físico todo o controle das ações pertinentes a movimentação da estrutura onde ficará alocada os cabides.
Será criado um aplicativo baseado no sistema Android OS, onde terá uma interface totalmente intuitiva, com os comandos para se fazer a conexão entre o smartphone e o Arduino, além dos principais comandos de movimentação e de parada da estrutura.
O Bluetooh é um protocolo com o layer físico baseado na norma IEEE
802.15.1. O Bluetooh 2.0 suporta velocidades de comunicação até 2,1 Mbps. As mais comuns implementações são as de baixo consumo cujo alcance pode chegar a 1m ou aos 10 m dependendo da classe de potência(Azevedo, 2012, p.24).
A conexão entre as partes do guarda-roupa automatizado e o aplicativo no sistema Android será feita utilizando o App Inventor, uma plataforma web criada pelo Massachusetts Institute of Technology(MIT). Esse software permite que aplicativos Android sejam desenvolvidos de maneira prática, diretamente pelo navegador, enquanto o usuário pode testar suas funções em um telefone ou emulador conectado.
Para criar aplicativos, você seleciona os componentes desejados e organiza blocos que definem o comportamento de cada um. Todo o processo é visual e intuitivo, como montar um quebra-cabeça, onde você vai encaixando as peças para que o aplicativo funcione conforme planejado.
Figura 5- Layout final do controle do celular

Fonte: Elaboração do autor, 2025
Conforme você adiciona componentes ao seu aplicativo, ele já aparece no celular, permitindo que você teste e ajuste o projeto em tempo real. Ao finalizar, é possível reunir tudo em um aplicativo executável para ser instalado em outros dispositivos.
Para controlar o movimento dos cabideiros, serão usados motores de corrente contínua alimentados com +12VDC. A direção dos motores será gerida por uma ponte H, que funciona como um drive de potência, acionando e invertendo o sentido dos motores. Esse controle é realizado com um circuito de relés e transistores, que, por meio de um sinal de baixa intensidade vindo do microcontrolador, comuta os relés da ponte H, permitindo acionar o motor responsável pelo movimento dos cabideiros, mesmo em cargas maiores.
Figura 6 – Montagem e Simulação no proteus – Diagramas Ponte H para acionamento de descida e subida dos cabideiros.
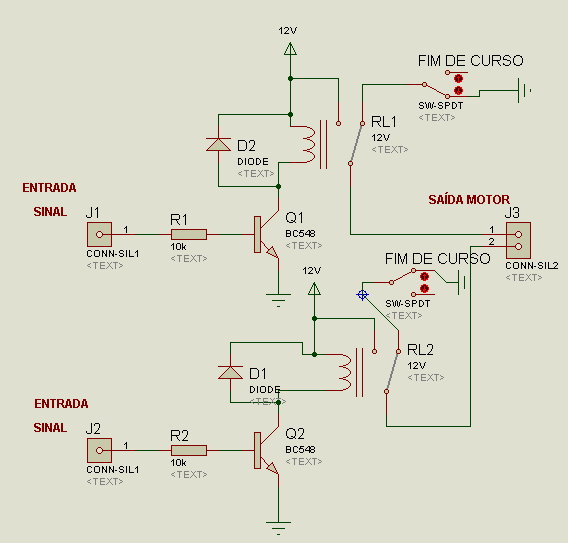
Fonte: Elaboração do autor, 2025
O esquema da figura 6 foi montado no software proteus 8.6 que permite a simulação com resultados com níveis de tensão e corrente elétrica. A entrada de sinal vem da placa de oito acopladores(4N25), que será mostrado na sequência. Quando o sinal é recebido ele chega na base do transistor que chaveia, fazendo com os +12𝑉𝐷𝐶, passem pela bobina do relé, comutando-o, os contatos NF do relé estão ligados também nos +12𝑉𝐷𝐶, para que não haja uma diferença de potencial, mantendo assim o motor parado, quando o relé é comutado seus contatos mudam de posição, de NF para o NA mandando para o terra, fazendo com que haja
D.D.P. e o motor gire. Na mesma linha do GND, como mostrado na imagem acima, há um F.C.,(fim de curso) que serve para limitar a subida e descida do cabideiro, ou seja, ao abrir quando atinge seu máximo o fim de curso interrompe o terra, fazendo com que não haja a DDP, e o motor pare na sua posição correta, de modo semelhante ao subir.
Para que esse processo de subir e descer dos cabideiros funcionem, antes é preciso o uso de opto acopladores, para que proteja o Arduíno, contra ruídos, sobrecargas, entre outras avarias elétricas, já que o arduino não suporta mais que aproximadamente 30mA.
O optoacoplador 4N25 isola de um dois circuitos nada mais é do que um LED e um transistor ligados em paralelo, e encapsulados. Quando um comando é reconhecido e o Arduino manda um sinal para o opto acoplador, que tem sua entrada no pino 1 do 4N25, e o pino 2 é ligado no terra justamente por se tratar de um diodo, do outro lado do 4N25 temos o transistor, que funciona como uma chave quando o LED é acionado. Essa chave de transistor funciona na função pull up, ou seja, quando o transistor comutar ele envia nível lógico 1 para sua saída, este sinal na saída é enviado para o relé(ponte h) que faz o acionamento dos motores.
Figura 7 – Montagem e simulação software proteus dos optoacopladores
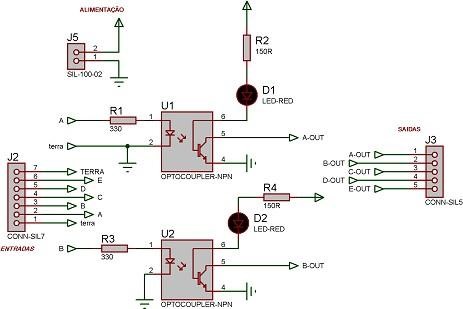
Fonte: Elaboração do autor, 2025
RESULTADOS FINAIS
Nos testes realizados, algumas restrições se fizeram necessárias, tais como:
Esta acessibilidade tem que ser alcançada com estabilidade e segurança;
O motor utilizado não poderá passar de 1.5 A para manter o torque constante de 5 kgfm, movendo cabides com até carga de 4kg de roupa;
A velocidade do motor deverá ser de no máximo 12 RPM para não comprometer a segurança do cadeirante, evitar solavancos e dar tempo de reação;
Caso este sistema for utilizado em uso contínuo, pode ser necessário a colocação de ventoinhas para manter a temperatura do motor, devido seu uso contínuo;
Seria ideal que na cadeira de roda tivesse uma base para colocação do celular, ou uma base seria puxada do próprio guarda roupa para colocar o celular, sem risco de queda do aparelho. Ou ainda, que o próprio guarda, tenha os comandos locais necessários para atuação sem o celular.
Figura 8-layout final
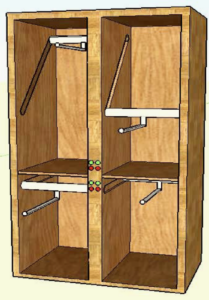
Fonte: Elaboração do autor, 2025
CONSIDERAÇÕES FINAIS
A realização do estudo para a execução desse projeto foi motivada pelo grande avanço da tecnologia na área da automação residencial, que tem por objetivo tornar hábitos cotidianos como o simples abrir e fechar de uma porta ou de uma janela, o apagar e o acender de uma lâmpada entre outros hábitos comuns, se tornarem menos cansativos devido ao grande desgaste causado pelo exercício repetitivo ou, como em alguns casos, devido ao grande esforço para a realização de uma tarefa rotineira, visto que uma pessoa com algum tipo de deficiência tem mais dificuldades para realizar algumas dessas tarefas comuns citadas acima entre outras do nosso dia a dia em um ambiente residencial.
Para ajudar a sanar um dos problemas encontrados pelos portadores de algum tipo de deficientes em suas casas foram realizadas pesquisas a fim de levantar tarefas rotineiras consideradas bruscas e que exigem maiores esforços e foram constatadas que grande parte dos problemas encontrados, com exceção da locomoção, estão diretamente relacionados com a altura de objetos o que mostrou-se um leque de oportunidade para automatizar o processo de diversos ambientes que possuem objetos cima de 1,20 m como por exemplo prateleiras, estantes até chegar ao tema deste projeto que é o guarda-roupa para deficientes físicos.Mas, que possivelmente este projeto pode se estender para outros tantos projetos inclusivos.
Esse tema é de suma importância para a elevação da autoestima e independência de uma pessoa com deficiência física e ampliação de novos projetos e melhorias visando aqueles que necessitam de algum tipo de cuidado especial, pois, por meio de pesquisas foram constatadas que muitas pessoas com deficiência física têm baixo animo, baixa autoestima entre outros fatores que levam alguns deles a cometerem suicídios ou atentados contra a própria vida. Fatores esses muitas vezes causados por se acharem excluídos da sociedade devido à falta de incentivo do governo a programas que sejam benéficos, como esporte e lazer ou a falta de emprego por motivos de falta de adaptações das empresas. A prova disto são as paraolimpíadas, que mostram como podem ser competitivos e persistentes.
O tema desse projeto também nos possibilita explorar os benefícios que a tecnologia da automação industrial pode trazer a sociedade como um todo, e deixando de lado a ideia de simples luxo em alguns casos, tais como residências automatizadas, e se tornando acessível para todos por razões éticas e de princípio moral que é auxiliar aqueles que realmente necessitam dessas aplicações. Assim contribuindo para o avanço tecnológico em prol dos nossos próximos, maiores estudos em ambientes acadêmicos e fabril, a olhar as pessoas com deficiência com bons olhos, a investir maior tempo e dinheiro contribuindo dessa maneira para uma sociedade melhor.
O desenvolvimento do projeto e a pesquisa abrangeram desde as dimensões do guarda-roupa, como largura e altura, até os movimentos necessários para seu funcionamento. Cada detalhe foi pensado, incluindo o torque do motor de corrente contínua, capaz de erguer e abaixar o cabide articulado, permitindo que o próprio usuário, sem necessidade de movimentos bruscos ou de deixar a cadeira de rodas, organize e acesse suas roupas com facilidade. A escolha de onde cada peça será colocada em seu compartimento cabe ao usuário, que também poderá retirá-las de forma independente, usando o controle por celular ou botões de acesso posicionados ao lado de cada compartimento para ajustar a altura conforme necessário.
Com isso chegamos a realização dos objetivos propostos no início desse projeto que é devolver independência às pessoas com deficiência física, elevar sua autoconfiança e autoestima entre outros, a fim de facilitar as atividades rotineiras que podem parecer simples para algumas pessoas, mas que para outras são muito difíceis. Porém, usando a tecnologia em benefício de todos, e de forma simples e eficaz. Certamente, contribuir para a criação de novas ideias e aprimorações que busquem melhorar a qualidade de vida humana é o objetivo de toda evolução.
REFERÊNCIAS BIBLIOGRÁFICAS
ABNT, Associação Brasileira de Normas Técnicas. NBR-9050 – Acessibilidade a edificações, mobiliário, espaços e equipamentos urbanos. Rio de Janeiro ABNT, 2020.
BRITO, Larissa Sales et al. Acessibilidade de cadeirantes em clínicas de fisioterapia do
DEVIDES Maria T.C. Design, Projeto e Produto: O desenvolvimento de móveis nas indústrias do Pólo Moveleiro de Arapongas, PR. Bauru, SP, 2006.
Instituto Brasileiro de Geografia e Estatística. Dados sobre Pessoa com deficiência no Brasil. 2022. Disponível em: . Acesso em: 23 de 0utubro de 2024.
NERI, Marcelo. Deficiência: Retratos da Deficiência no Brasil. Rio de Janeiro: FGV/IBRE, CPS, 2008.
Plano Piloto de Brasília–DF-doi: 10.5102/ucs. v4i1. 20. Universitas: Ciências da Saúde, v. 4, n. 1, p. 17-35, 2008.
SASSAKI, Romeu Kazami. Inclusão construindo uma sociedade para todos. Rio de Janeiro, 1999.