INTRODUÇÃO
Atualmente, evidencia-se o papel fundamental do sistema de localização por GPS em diversas atividades cotidianas, tornando-se indispensável para a sociedade. A necessidade de geolocalização rápida e precisa manifesta-se em situações que variam desde solicitações de serviços até a execução de grandes obras.
Esse avanço tecnológico também transformou significativamente a cartografia e a agrimensura, especialmente na etapa de medições topográficas de campo. Técnicas tradicionais, como medições com trenas, correntes de agrimensura e até o uso de estações totais, foram progressivamente substituídas por receptores GNSS, principalmente com a popularização dos métodos RTK – Real Time Kinematic.
Apesar da ampla utilização desses equipamentos entre profissionais da área, observa-se que apenas uma parcela reduzida realmente compreende o funcionamento dos dispositivos em uso. Essa limitação de conhecimento pode gerar dificuldades no processamento dos pontos coletados, provocar erros na coleta de dados e, em casos mais graves, resultar em falhas significativas na elaboração de plantas, caso não haja um entendimento profundo sobre o funcionamento dos aparelhos empregados.
O SISTEMA DE POSICIONAMENTO GLOBAL – BREVE HISTÓRIA
Os registros históricos relatam o período pós-Segunda Guerra Mundial como uma época marcada pela tensão da Guerra Fria, uma disputa civil-militar entre Estados Unidos e União Soviética. Durante esse contexto, ambos os países buscaram métodos eficazes de localização global. Nos Estados Unidos, foi lançado na década de 1960 o primeiro satélite Transit, que serviu como experimento ao transmitir um sinal de horário para a Terra, recebido em solo com um atraso de cerca de sete milésimos de segundo. O satélite utilizava o princípio físico conhecido como Efeito Doppler, descrito por Christian Doppler em 1842, fenômeno que explica a alteração na frequência de ondas conforme o movimento em relação ao observador — maior quando se aproxima, menor ao se afastar —, permitindo a localização de objetos em movimento.
Com o aprimoramento desses sistemas, em 1978 teve início o envio da constelação GPS, composta por 24 satélites distribuídos em seis órbitas diferentes, garantindo cobertura global. O sistema passou por ajustes e, no início dos anos 1990, foi considerado completo e operacional. Inicialmente, o uso era restrito ao âmbito militar, enquanto o sinal civil possuía precisão limitada devido à deterioração proposital.
Segundo Mônico (2000, p.22), essa limitação foi abolida em 2 de maio de 2000, quando a acurácia do GPS foi aprimorada em cerca de dez vezes. Após essa mudança, o método de posicionamento tornou-se amplamente adotado pela sociedade, presente em equipamentos que vão de celulares a drones militares. Rabbany (2002, p.04) destaca que a primeira geração de satélites, denominada Block I, foi construída para fins experimentais, com vida útil prevista de 4,5 anos, embora alguns tenham permanecido em operações por mais de uma década. Posteriormente, surgiram as gerações Block II e Block IIA, com maior capacidade de armazenamento de dados de navegação — 14 dias para Block II e 180 dias para Block IIA —, dispensando monitoramento constante e funcionando de modo pré-programado.
Para assegurar a segurança nacional, recursos de disponibilidade seletiva (SA) e antispoofing foram incorporados aos satélites Block II/IIA, distorcendo o sinal para impedir usos militares por outros países. Atualmente, a geração Block IIR conta com 21 satélites, capazes de operar autonomamente por seis meses sem correções terrestres ou degradação de precisão. Segundo Rabbany (2002, p.05), essa autonomia é possível graças à capacidade mútua de alcance entre satélites e ao carregamento de efemérides previstas e dados de relógio para até 210 dias.
Além do sistema norte-americano, a rede global de satélites abrange alternativas como o GLONASS, desenvolvido pela Rússia; o Galileo, pela União Europeia; e o Beidou, pela China, todos acessíveis mundialmente. Há também o QZSS, sistema regional japonês voltado para aprimorar a navegação na região Ásia-Pacífico.
SIMPLES FUNCIONAMENTO
O funcionamento desse sistema, embora pareça complexo, baseia-se em um princípio bastante simples: uma constelação de satélites orbita a Terra em trajetórias previamente determinadas, permitindo que qualquer aparelho em solo consiga observar no mínimo três emissores simultaneamente. O processo de localização utiliza a diferença de tempo que o sinal leva para percorrer o trajeto entre o emissor e o receptor. Com o conhecimento da velocidade da luz, torna-se possível determinar a distância até o objeto apenas cronometrando o intervalo entre a emissão do sinal e sua recepção.
Conforme destacado por Rabbany (2002, p.14), o GPS fornece informações contínuas de posicionamento e tempo, independentemente do local no planeta ou das condições climáticas, atendendo um número ilimitado de usuários e sendo utilizado também para fins de segurança, sempre em modo unidirecional. Ou seja, o satélite transmite continuamente, a partir do espaço, um sinal com sua posição e o horário exato do envio, não havendo troca direta de informações do receptor terrestre para o emissor.
Tecnicamente, o observável fundamental do Sistema de Posicionamento Global (GPS) consiste no tempo que o sinal leva ao percorrer o espaço do satélite até o receptor, considerando os relógios de ambos os equipamentos. Diferente da medição eletrônica de distância tradicional, é preciso considerar o sincronismo entre esses relógios.
Resumidamente, desconsiderando questões de alimentação, blindagem contra radiações, entre outros, o satélite GPS é composto basicamente por um relógio atômico, responsável por enviar para a Terra um sinal que contém tanto a rota orbital quanto o horário exato de partida. O aparelho em solo, ao captar e decodificar esse sinal, calcula o tempo de deslocamento do mesmo.
Dessa forma, a localização em qualquer ponto do globo é obtida pelo receptor, que capta e interpreta o atraso entre a emissão e a recepção do sinal de rádio proveniente do satélite. Por exemplo, se determinado satélite emite um sinal às 0:00:00, e esse sinal é captado pelo receptor terrestre às 0:00:00,006 (um atraso de seis milésimos de segundo), o cálculo da distância é feito multiplicando esse valor pela velocidade da luz no vácuo (299.792.458 m/s), resultando em 1.798.754,75 metros — aproximadamente 1.800 km entre emissor e receptor.
Entretanto, essa abordagem isolada não é suficiente para determinar a posição de um objeto na superfície terrestre; ela apenas indica a distância entre o receptor e o emissor do sinal. Para que a localização exata seja obtida, é necessário aplicar conceitos adicionais e recorrer a métodos de cálculo mais avançados.
O sistema de localização por satélite baseia-se em alguns conceitos simples:
A estimativa da topografia de um ponto no solo torna-se inviável para cálculos de localização, já que o relevo passa por constantes transformações, seja por deslizamentos, aterros ou ação humana. Tal dinâmica impede o uso direto da topografia como base para a localização, pois cada ponto exigiria uma hipótese matemática específica para definição daquele relevo. Para contornar essa limitação, adota-se uma superfície matemática lisa que representa ou se aproxima da realidade do terreno; a essa superfície atribui-se o nome de Elipsóide. Na figura abaixo, o esquema básico da elipsóide pode ser observado com clareza, destacando a posição P sobre a superfície terrestre, enquanto as linhas curvas ilustram a estrutura matemática denominada Elipsóide.
Figura 1 – Elipsóide. Esquema básico de uma elipsóide.

Fonte: XU, GPS Theory Algorithms and Applications (2007).
Os sistemas de localização, portanto, utilizam a sua base na elipsóide, que possui fórmula matemática para se determinar sua curvatura, e com base nela calculam as distâncias do local até o emissor de sinal.
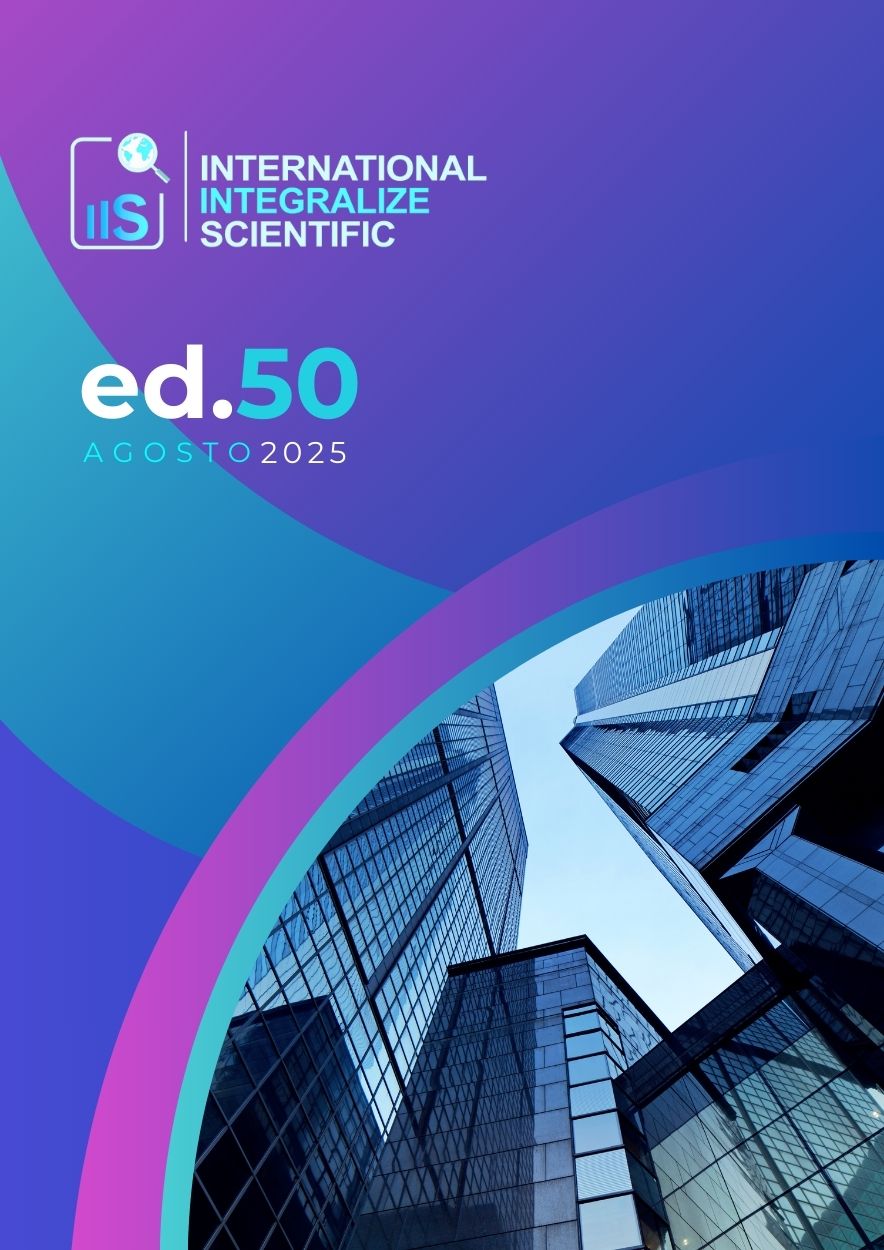
O segundo conceito essencial para o funcionamento da localização por satélite diz respeito às trajetórias dos satélites. Cada equipamento que compõe a constelação GPS segue uma órbita previamente determinada, com horários e posições conhecidos. Assim, ao considerar essa trajetória e o tempo padrão de transmissão dos sinais, pode-se entender que, quanto maior o intervalo entre o envio do sinal pelo satélite e seu recebimento pelo receptor GNSS em solo, maior será a distância do dispositivo até a linha de referência da órbita do satélite, representada na ilustração abaixo.
Figura 2 – Rotas de satélites. Representação das rotas dos satélites.
Fonte: Autoria própria (2025)
Para ilustrar o funcionamento do sistema de localização: um carro percorrendo uma estrada no planalto central brasileiro, equipado com um dispositivo capaz de captar e decodificar os sinais enviados pelos satélites, como um celular com aplicativo de localização ativado. Quando a aplicação é acionada, o chip do dispositivo recebe o sinal emitido por um satélite em órbita. Graças ao registro da rota e dos horários de transmissão desse satélite, é possível saber exatamente a posição em que ele se encontra sobre a Terra no momento do envio, assim como o trajeto percorrido na elipsóide.
Se o sinal desse satélite, no ponto mais próximo da superfície, for recebido com um atraso de 0,006 segundos (ou seja, seis milésimos de segundo, equivalente a 1.798.754 metros de distância entre a projeção da linha da elipsóide e o satélite), e o aparelho em solo acusar um tempo de chegada de 0,0060000015 segundos, ao multiplicar esse valor pela velocidade da luz, chega-se ao resultado de 1.798.761,27 metros do emissor. Contudo, essa é a distância inclinada entre o equipamento receptor e o satélite, e não a distância até a linha da rota.
Considerando que essa distância corresponde à hipotenusa de um triângulo retângulo, cuja base está alinhada ao ponto de referência diretamente abaixo do satélite, basta calcular o cateto restante para estimar a posição atual do receptor em relação ao ponto exato da órbita do satélite naquele instante.
Ao aplicar os cálculos utilizando o teorema de Pitágoras, conclui-se que a única posição possível corresponde a um raio de 5.116 metros a partir da linha de referência. Considerando que a distância inclinada entre o ponto de recepção e o satélite equivale a 1.798.791 metros, pode-se estabelecer a seguinte relação: 1.798.791² = 1.798.754² + c², resultando em um valor de 5.116 metros para o cateto. Assim, a localização possível está restrita a uma região definida por esse raio ao redor da linha projetada pelo satélite.
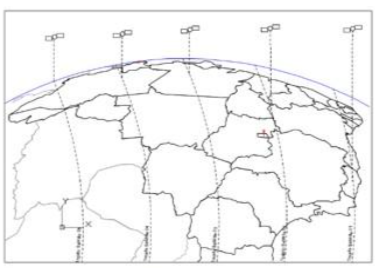
O desafio, nesse estágio, é que a posição ainda permanece indefinida: sabe-se apenas que o ponto de interesse encontra-se em algum local dentro de um raio de 5.116 metros do ponto de referência, tornando a localização imprecisa. Conforme ilustrado na imagem abaixo, qualquer ponto da região azul pode representar a localização possível. Dessa forma, fica claro que não é viável determinar, com precisão, a posição de um observador considerando apenas um satélite; por isso, o sistema precisa buscar o sinal de um segundo satélite para refinar a estimativa.
Figura 3 – Recepção do sinal do satélite. Raio da possível localização do observador.
Fonte: Elaborado pelo autor (2025).
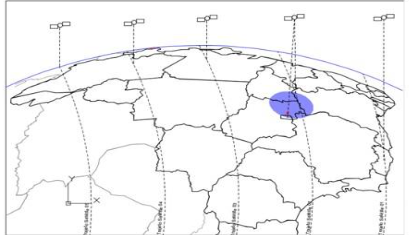
Nesse cenário, o sinal de um segundo satélite é captado, proveniente de uma rota diferente, apresentando um atraso de 6,751 milésimos de segundo — o que equivale, aproximadamente, a 2.024 quilômetros do emissor ou, com base em cálculos trigonométricos, a um raio de 928 quilômetros do ponto orbital correspondente naquele instante. Como ilustrado na imagem adjacente, a área de busca passa a ser limitada aos pontos de interseção entre os círculos representados pelas diferentes distâncias. Assim, a localização possível reduz-se a dois pontos distintos, onde os círculos vermelho e azul se encontram, pois em nenhum outro local seria possível captar simultaneamente os sinais indicados em azul e vermelho.
Figura 4 – Exemplo da recepção do sinal de dois satélites. Encontro dos raios do cálculo de distância de dois satélites.
Fonte: Elaborado pelo autor (2025).
Ao considerar o sinal de um terceiro satélite, oriundo de uma rota e horário distintos, observa-se que um atraso de 8,02 milésimos de segundo corresponde a um raio de 1.599 metros em relação ao ponto de referência na elipsóide, representado, neste exemplo, pelo círculo verde.
Desse modo, verifica-se que a única localização possível é o ponto exato onde os raios dos três sinais de satélite se cruzam, pois esse é o único local, entre milhares, em que as distâncias coincidem simultaneamente, conforme ilustrado na figura 05.
Figura 5 – Exemplo do sinal de três satélites. Raio calculado da distância do sinal dos três satélites imaginários.
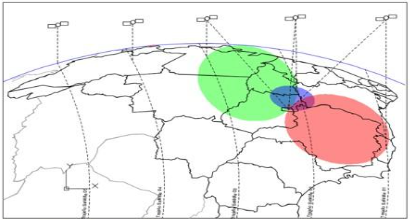
Fonte: Elaborado pelo autor (2025).
Ao analisar a figura 05, percebe-se que as linhas dos raios de distância hipotética dos três satélites convergem em um único ponto, não sendo possível que essas três distâncias coincidam, naquele instante, em qualquer outro local. Com isso, obtém-se uma localização aproximada da posição do veículo sobre o globo terrestre, utilizando apenas a diferença entre o horário de emissão do sinal e o horário de recebimento em solo.
Assim, torna-se possível evidenciar a simplicidade inerente ao funcionamento do sistema de localização por GPS, afastando a percepção de que se trata de uma técnica excessivamente complexa ou inacessível. Contudo, embora o princípio básico seja direto, ainda existem desafios a serem superados para alcançar coordenadas realmente precisas.
Observa-se então, que seria necessário apenas que se captasse o sinal de três satélites para que se obtivéssemos a localização sobre o globo terrestre, porém é recomendável a utilização de, no mínimo, quatro sinais para uma correta localização “Do ponto de vista prático, no entanto, um quarto satélite é necessário para levar em conta o deslocamento do relógio do receptor” (Rabbany , 2002, tradução nossa).
ERROS E CORREÇÕES DO SINAL
De acordo com o analisado anteriormente, o sistema de localização por GPS apresenta falhas, muitas delas resultantes de atrasos durante a travessia do sinal emitido pelo satélite pela ionosfera ou troposfera terrestre. Esses atrasos, ainda que mínimos, acabam reduzindo a precisão das coordenadas, uma vez que ampliam virtualmente a distância entre receptor e emissor, conforme já foi explicado. Outras dificuldades também são observadas no processo de localização, tais como erros de multicaminhamento do sinal do satélite, ruído de medição do receptor, discrepâncias nos relógios de satélite e receptor, além de eventuais imprecisões nas trajetórias dos satélites.
O erro de atraso ionosférico ocorre quando o sinal atravessa a ionosfera, uma região superior da atmosfera terrestre em que a radiação solar, especialmente os raios X, interage com as moléculas de gás, provocando a ionização desse meio. Essa camada, situada entre aproximadamente 50 km e 1000 km de altitude, contém elevada concentração de elétrons livres, bem como átomos e moléculas eletricamente carregados. A ionosfera, por ser um meio dispersivo, curva e altera a velocidade do sinal de rádio do GPS à medida que ele cruza suas diferentes camadas, conforme explica Rabbany (2002, p.21). Para mitigar esse tipo de erro, são aplicados modelos matemáticos como o modelo ionosférico empírico de Klobuchar, capaz de corrigir até 60% do atraso causado.
Há também o erro conhecido como atraso troposférico: a Troposfera é a camada mais baixa de nossa atmosfera, estimada em até 50km, é uma região atmosférica eletricamente neutra, sendo um meio não dispersivo para frequências de rádio abaixo de 15GHZ, ainda de acordo com Rabbany (2002, p.21) “Como resultado, ela atrasa as portadoras e códigos GPS de forma idêntica. Ou seja, o alcance medido do satélite para o receptor será maior do que o alcance geométrico real, o que significa que a distância entre dois receptores será maior do que a distância real.” Segundo o autor, esse problema pode ser mitigado utilizando-se modelos matemáticos para simulação das temperaturas, pressão e umidade no momento da passagem do sinal por essa camada, “Foi descoberto que usar dados meteorológicos padrão (1.010 mb para pressão atmosférica, 20 °C para temperatura e 50% para umidade relativa)fornece resultados satisfatórios na maioria dos casos.” Rabbany (2002, p.23).
Também são observados erros associados aos relógios presentes nos satélites e nos receptores, pois, mesmo sendo altamente precisos, esses dispositivos não atingem a perfeição absoluta. Os relógios utilizados tanto nos satélites quanto nos receptores GNSS diferem dos convencionais, já que, apesar de medirem o tempo, não o exibem em horas, minutos e segundos da mesma forma que um relógio comum. Conforme explica Rabbany (2002, p.18), “O Tempo GPS é a escala de tempo usada para referenciar, ou marcar o tempo, dos sinais GPS. Ele é computado com base nas escalas de tempo geradas pelos relógios atômicos nas estações de monitoramento e satélites GPS a bordo.” Dessa forma, compreende-se que o Tempo GPS é calculado de modo contínuo e não retorna ao ponto zero, como ocorre em relógios usuais todos os dias à meia-noite. Segundo Rabbany (2002, p.18), “Não há segundos intercalados introduzidos no Tempo GPS, o que significa que o Tempo GPS é uma escala de tempo contínua. A escala de Tempo GPS foi definida igual à do UTC em 6 de janeiro de 1980.”
Os receptores GPS mais avançados contam com quatro relógios atômicos, sendo dois de césio e dois de rubídio. Essa configuração evidencia uma diferença fundamental em relação aos relógios convencionais utilizados em terra: nos satélites, a marcação do tempo não depende de mecanismos de engrenagem, mas sim da vibração constante dos materiais atômicos mencionados. Essa característica garante uma continuidade precisa na contagem do tempo, fator especialmente relevante considerando que ajustes manuais são inviáveis em equipamentos instalados no espaço.
Apesar da utilização de materiais atômicos como referência para marcar a passagem do tempo, ainda podem ocorrer pequenas variações entre os relógios dos satélites e dos receptores, bem como na própria medição do tempo realizada. Conforme aponta Rabbany (2002, p.18), devido aos segundos intercalados introduzidos na escala de tempo UTC, o Tempo GPS avançou 13 segundos em relação ao UTC em 1º de janeiro de 1999. Embora essa diferença pareça mínima, sabe-se que pequenas variações na marcação do tempo resultam em erros de posicionamento em solo, em razão das grandes distâncias percorridas pelo sinal entre o emissor e o receptor.
Além dos fatores já analisados, destacam-se os erros de multicaminhamento que ocorrem no percurso do sinal entre emissor e receptor. A luz apresenta diversas bandas em seu espectro, algumas visíveis ao olho humano, como as cores percebidas durante o dia, e outras invisíveis, como ultravioleta, infravermelha e ondas de rádio. O sinal transmitido pelo satélite pertence a uma dessas bandas, representando uma fração do espectro luminoso — sendo um tipo de luz não detectável pela visão humana, mas captada por equipamentos específicos.
Esses sinais, assim como outros tipos de luz, podem sofrer reflexão em superfícies diversas. Em levantamentos próximos a lagos, por exemplo, o receptor pode registrar tanto o sinal direto do satélite quanto versões refletidas na água, que chegam com atraso em relação ao original. Esse fenômeno pode ocorrer diante de diferentes superfícies, gerando o chamado erro de multicaminhamento, responsável por boa parte da perda de precisão nas medições realizadas em campo.
Para mitigar esse tipo de interferência, receptores são equipados com barreiras especiais que bloqueiam sinais recebidos em ângulos muito perpendiculares ao equipamento. Ressalte-se, no entanto, que tais medidas atenuam, mas não eliminam completamente o problema.
É importante observar também que, por estarem em órbita, os satélites não mantêm uma posição fixa em relação ao solo. Suas rotas podem apresentar pequenas variações devido a interferências gravitacionais de outros astros em relativa proximidade, fenômeno conhecido como efemérides. Esses erros são reduzidos por meio de sistemas especializados denominados Seguimento de Controle.
SEGUIMENTO DE CONTROLE
O segmento de controle do GPS é formado por pontos fixos de coordenadas precisamente conhecidas, distribuídos ao redor do mundo e monitorados ininterruptamente, 24 horas por dia. Essa rede de estações terrestres desempenha papel fundamental na identificação e correção de eventuais erros do sistema, garantindo maior fidelidade aos dados.
O funcionamento do sistema GPS baseia-se em uma estação central de controle, apoiada por uma malha global de estações de monitoramento terrestre. Segundo Rabbany (2002, p.07), “Existem cinco estações de monitoramento, localizadas em Colorado Springs (com o MCS), Havaí, Kwajalein, Diego Garcia e Ascension Island. As posições (ou coordenadas) dessas estações de monitoramento são conhecidas com muita precisão…”. Essas unidades são equipadas com receptores de alta tecnologia e precisão, contando, assim como os satélites em órbita, com relógios de oscilador de césio para rastreamento contínuo dos satélites GPS visíveis.
Tal estrutura evita que diferenças entre osciladores do emissor e do receptor comprometam a exatidão dos dados, assegurando um processamento de sinal muito mais preciso do que aquele realizado pelos receptores comuns, que, normalmente, não dispõem de osciladores de césio em sua composição.
Figura 6 – Seguimento solo: A rede de monitoramento e ajustamento do sistema GPS.
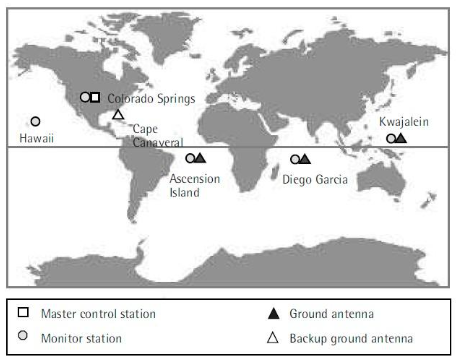
Fonte: Rabbany, (2002, p.07)
A imagem apresentada ilustra de forma clara a intenção de demonstrar a distribuição da rede de monitoramento ao redor do planeta, com especial atenção para as regiões próximas à linha do equador. Todas as estações do sistema funcionam de forma autônoma, sendo operadas remotamente pela estação central de controle, situada em Colorado Springs, nos Estados Unidos. Esta central é responsável por receber, processar e monitorar todos os dados transmitidos pelas demais estações, emitindo diariamente notas de correção dos satélites em órbita. Esses dados, conhecidos como efemérides precisas, estão disponíveis para download e podem ser utilizados em programas de processamento dos pontos coletados em campo, promovendo uma considerável melhora na precisão dos resultados obtidos no pós-processamento.
CONSIDERAÇÕES FINAIS
O presente artigo tem como objetivo oferecer suporte a profissionais de cartografia, agrimensura e demais interessados na compreensão dos princípios e funcionamento do sistema de localização por satélite.
Esse método de posicionamento baseia-se em uma lógica aparentemente simples: equipamentos orbitam rotas predefinidas ao redor do planeta e a análise das variações temporais entre a emissão e a recepção dos sinais determina, com precisão, a localização dos receptores terrestres.
Embora o conceito seja direto, sua aplicação exige rigor técnico e conhecimento detalhado dos processos envolvidos, desde o controle dos equipamentos até a execução das medições em campo. O uso de instrumentos de alta precisão demanda atenção minuciosa nas etapas de coleta, preparação e processamento dos dados. Pequenas variações no processamento podem resultar em impactos significativos nos resultados obtidos, demonstrando a importância do cuidado e da expertise profissional em todas as fases do trabalho.
REFERÊNCIAS BIBLIOGRÁFICAS
MONICO, J.F.G., Posicionamento pelo NAVSTAR-GPS Descrição, fundamentos e aplicações. Presidente Prudente: Editora UNESP, 2000.
RABBANY, A, El. GPS: The Global Posicioning Sistem. Artech House, London, 2002.
XU, G. GPS: Theory, Algorithms and Applicatinons. 2ª ed. GeoForschungsZentrum Potsdam, Potsdam, Germany, 2007.