INTRODUÇÃO
Com a evolução da tecnologia na engenharia elétrica de automação industrial, ampliou as possibilidades de criação de produtos voltados para os portadores de necessidades visuais. Pois, tem-se novos e sofisticados dispositivos de controle, supervisão e monitoramento local e remoto através de bluetooth, Wi-Fi, rádio frequência e por satélite. Pode-se ser acionado por celular, joystick, PC…
A automação é a substituição do trabalho humano por máquinas. Automação é o controle de processos automáticos. Automático significa que existe um mecanismo automático que executa a ação necessária em um determinado momento ou depende de determinadas condições. Algumas pessoas confundem controle automático com automação porque o controle automático ocorre com pouca intervenção humana por parte de um operador. O controlo automático é um nível de automação, existindo também outros controlos automáticos como alarme e bloqueio, incêndio e detecção de incêndio (Ribeiro 2003, p. 9).
Devido a necessidade de diminuir os esforços do trabalho braçal do homem, e assim, poder dedicar mais tempo a família, lazer, artes e outros entretenimentos, surgiram a necessidade de mecanizar os trabalhos. Existem registros de 3500 a.C., de processos que utilizavam esses métodos de mecanização. Atualmente, a automação que visa substituir o trabalho humano, se dá através de tecnologias microprocessadas e microcontroladas conhecidas também como microcontroladores e controladores lógicos programáveis (CLP).
Deu-se início a automação industrial no século XVIII com a criação da máquina a vapor e com a revolução industrial, pois, para que tenha automação industrial é necessária indústria. O desenvolvimento da indústria na Europa e Estados Unidos foi impulsionado devido a muitas inovações como a substituição do ferro pelo aço e a descoberta de novas fontes de energia.
A princípio, o conceito da indústria já estivesse bastante consolidado no início do século XX, os processos fabris de automação ainda eram bastante rudimentares. Devido a aumento da produção em larga escala, maior qualidade, lucro etc. Como resultado deu-se início a era da revolução industrial. Devido aos conceitos de produção em escala a linha de montagem em 1909 foi idealizada por Henry Ford (1863- 1947) da GM, idealizou algo que ele chamou linha de montagem que certamente foi o ponto inicial para o grande desenvolvimento industrial que revolucionou a época. A GM, em meados daquele século, já produzia automóveis em larga escala em linhas de produção com máquinas automatizadas por relés, neste meio tempo que surgirá a morte de Henry Ford.
Por fim em 1968, surgiu o primeiro controlador lógico programável que tinha como objetivo substituir os relés, que eram dispositivos eletromecânicos que tornavam a programação das máquinas bastante complexa, alto consumo de energia, pequena vida útil dos relés, além de problemas estruturais de cabeamento. Em suma a empresa (Bed Ford Association), em Bed Ford USA, foi responsável de desenvolver esse novo tipo de controlador denominado de MODICON (Modular Digital Controller), tornando o sistema muito mais eficiente, flexível e econômico.
JUSTIFICATIVA
Segundo a Organização Mundial da Saúde (OMS), existem aproximadamente 39 milhões de pessoas com deficiência visual em todo o mundo. Segundo a OMS, mais 246 milhões de pessoas sofrem de perda de visão moderada ou grave, 90% das quais vivem em países em desenvolvimento. A agência estima que 19 milhões de crianças com menos de 15 anos têm problemas de visão. Destes, 12 milhões de pessoas sofrem de doenças que são facilmente diagnosticadas e corrigidas. O grupo afirma que cerca de 1,5 milhão de menores sofrem da chamada cegueira irreversível e nunca mais poderão ver. Segundo a OMS, dois terços destas crianças morrerão dentro de dois anos após perderem a visão.
A questão da escolha do organizador de calçados foi desenvolvida porque que nos dias de hoje o cego está cada vez mais inserido nas atividades normais de pessoas comuns, como trabalhos, reuniões, cargos importantes etc., e com isso o cego também tem se preocupado com suas vestimentas, por isso eles precisam de uma organização minuciosa, para que não haja confusão. Por não possuírem a visão, esse trabalho acaba sendo um pouco complexo, para pessoas que já nasceram cegas isso é uma atividade que acabam acostumando-se, porém, pessoas que ficam cegas ao longo da vida isso é uma dificuldade para se adaptar.
OBJETIVOS
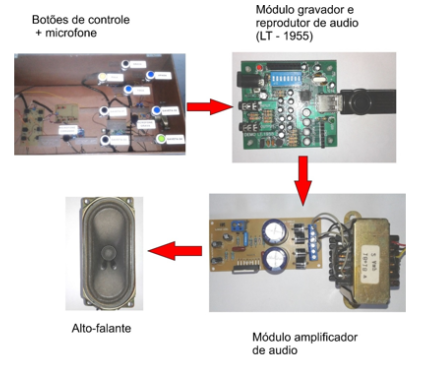
O objetivo deste projeto será desenvolver um mobiliário organizador de calçados automatizado, que através de dois sentidos: Tato e audição, possibilitam a identificação e organização dos seus calçados, assim como é mostrado na figura 04. O tato faz parte da vida do cego, onde ele realiza as principais atividades, seja para sentir a temperatura, a textura de algo, o próprio braile entre outras coisas. Adiciona-se a audição, pois neste projeto o cego poderá, com o auxílio da sua própria voz gravar onde guardou seus pertences, e ainda com a voz dar um comando para que o gaveteiro mostre onde ele os guardou, fazendo assim com que o cego tenha mais confiança para poder guardar e recuperá-los, sem medo de errar ou misturar os calçados, tornando-se assim uma prática saudável, sem desconforto, e de grande auxílio para o seu dia a dia.
Para sua realização, será utilizado uma estrutura de madeira com acrílico, e gavetas dispostas na vertical, com movimentos de abertura semelhantes ao de portão de garagem basculante, com ângulo de abertura de aproximadamente 30° para ter maior facilidade na hora de guardar e retirar os pertences, evitando a queda do calçado retirado. A sapateira também será composta por circuitos de reconhecimento e comandos de voz, e um circuito para gravação e reprodução da voz, fornecendo assim, à pessoa com deficiência visual, maior comodidade e menor tempo para encontrar seus pertences.
DESENVOLVIMENTO
Automação equivale a medição real do que está acontecendo no momento, e permitir reação imediata. Portanto, diferentes tipos de equipamentos são utilizados para realizar a automação. Historicamente, o primeiro termo utilizado foi controle automático de processos. Equipamentos com capacidade de medir, transferir, comparar e intervir em processos foram utilizados para atingir o produto desejado com pouca ou nenhuma ajuda humana, ou seja, sob controle automático ou automatizado.
Com o aumento da complexidade dos sistemas de automação só se tornaram possíveis por causa dos recentes e grandes avanços na eletrônica. A eletrônica microprocessada é um dos grandes responsáveis pelo sucesso da automação, permitindo a construção dos CLP’s (Controladores Lógicos Programáveis) muito utilizados na indústria em geral.
No contexto da automação industrial, é fundamental compreender que essa área reúne diferentes especialidades técnicas, exigindo uma integração eficaz entre elas. De acordo com Rosário (2005), a automação depende de três pilares tecnológicos: a eletrônica, que cuida do hardware; a mecânica, que lida com os componentes físicos e estruturais; e a informática, voltada para o desenvolvimento dos sistemas de controle e software. Por isso, a execução de projetos nessa área requer uma equipe multidisciplinar bem coordenada ou profissionais com formação abrangente, capazes de integrar esses conhecimentos em soluções completas e funcionais.
Neste projeto será utilizado o módulo de reconhecimento de voz V3 (figura 01), uma ferramenta compacta e de fácil manuseio, projetada para executar diferentes funções por meio de comandos de voz. Ele tem a capacidade de reconhecer até 80 comandos distintos, organizados em grupos, sendo possível ativar até sete comandos por vez. Cada comando pode ter até cerca de 1,5 segundo de duração, o que corresponde, geralmente, a uma ou duas palavras. O módulo oferece dois modos de operação: por meio da porta serial ou utilizando os pinos de entrada e saída. Em condições ideais, o reconhecimento de voz pode atingir uma precisão de até 99%, o que o torna uma solução eficiente para projetos que exigem controle por voz.
Figura 01 – Esquema eletrônico do módulo reconhecedor de voz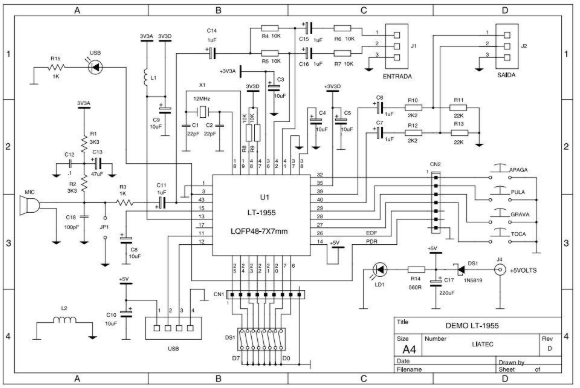
Fonte: Liatec.
O esquema do opto acoplador da figura 02 mostra um funcionamento simples e prático. A entrada de sinal vem da placa de opto acopladores (4N25), que será mostrado na sequência. Quando o sinal é recebido ele chega na base do transistor que chaveia, fazendo com os 12 V, passem pela bobina do relé, comutando-o, os contatos NF do relé estão ligados também nos 12 V, para que não haja uma diferença de potencial, mantendo assim o motor parado, quando o relé é comutado seus contatos mudam de posição, e o NF para o NA que será aterrado, fazendo com que haja D.D.P. e o motor gire. Na mesma linha do GND, como mostrado na imagem acima, há um F.C., (fim de curso) que serve para limitar a abertura e o fechamento das gavetas, ou seja, ao abrir quando atinge seu máximo o fim de curso interrompe a terra, fazendo com que não haja a DDP, e o motor pare na sua posição correta, de modo semelhante ao fechar. Esse esquema se repete para todas as outras gavetas, tendo cada motor sua Ponte H (figura 03) para acionamento.
Para que esse processo de abertura e fechamento das gavetas funcionem, antes é preciso o uso de opto acopladores, para que proteja o Arduino, contra ruídos, sobrecargas, entre outras avarias elétricas.
Figura 02 – Esquema opto acoplador (4N25)
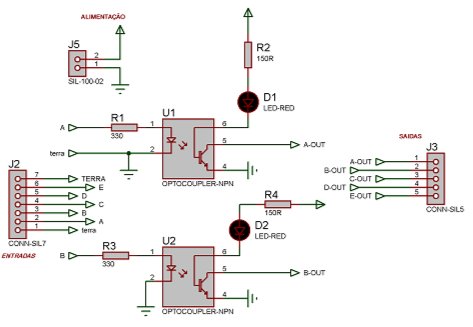
Fonte: Elaborado pelo autor (2025).
Para que possa abrir e fechar as gavetas serão usados motores de corrente contínua, com alimentação de 12V CC. Para este projeto utilizou-se uma ponte H (figura 03) como drive de potência que faz o acionamento e reversão de motores, para isso utilizou-se um circuito que possui relés e transistores, pois, através de um sinal de pequena intensidade vindo do microcontrolador que comuta os relés da ponte H, desta maneira consegue se acionar cargas com potência maior como o motor que faz o acionamento das gavetas.
Figura 03 – Ponte H.
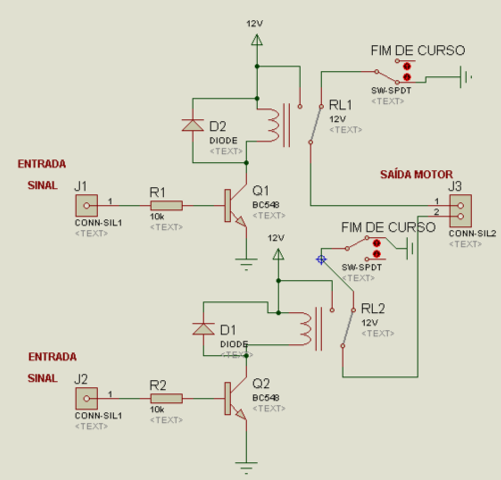
Fonte: Elaborado pelo autor (2025).
O 4N25 nada mais é do que um LED e um transistor ligados em paralelo, e encapsulados. Quando um comando de voz é reconhecido e o Arduino manda um sinal para o opto acoplador, que tem sua entrada no pino 1 do 4N25, e o pino 2 é ligado no ponto terra justamente por se tratar de um diodo, do outro lado do 4N25 está o transistor, que funciona como uma chave quando o LED é acionado. Essa chave de transistor funciona na função pull up, ou seja, quando o transistor comutar ele envia nível lógico 1 para sua saída, esse sinal na saída é enviado para a placa de relé (ponte h) que faz o acionamento dos motores. Observa-se que que quando uma gaveta está abrindo é necessário o aviso sonoro, e o com a ajuda do 4N25 é possível acionar o buzzer, onde na saída do opto acoplador ao invés de ir para a placa ponte H, vai direto para o buzzer.
Figura 04 – Construção do projeto
Fonte: Elaborado pelo autor (2025).
Assim como alfabeto normal, com letras normais, o Braille também é uma sequência de códigos, que utilizada para a comunicação.
O sistema de escrita em relevo conhecido pelo nome de Braille é constituído por 63 sinais formados por pontos a partir do conjunto matricial (123456). Este conjunto de 6 pontos chama-se, por isso, sinal fundamental. O espaço por ele ocupado, ou por qualquer outro sinal, denomina-se cela braille ou célula braille e, quando vazio, é também considerado por alguns especialistas como um sinal, passando assim o sistema a ser composto com 64 sinais. 2. Para facilmente se identificarem e se estabelecer exatamente a sua posição relativa, os pontos são numerados de cima para baixo e da esquerda para a direita. Os três pontos que formam a coluna ou fila vertical esquerda, , têm os números 1, 2, 3; aos que compõem a coluna ou fila vertical direita, cabem os números 4, 5, 6. Os números dos pontos dos sinais braille escrevem-se consecutivamente, com o sinal de número apenas antes do primeiro ponto de cada cela. (Grafia Braille para a língua Portuguesa, 2006, p. 17).
Sendo assim chegou-se aos seguintes símbolos alfanuméricos brasileiros.
Figura 05 – Alfabeto em braille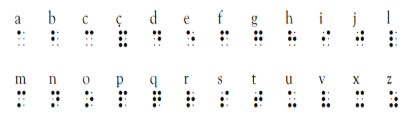
Fonte: Grafia braille para a língua portuguesa.
Figura 06 – Letras com diacríticos.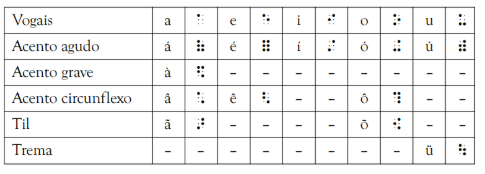
Fonte: Grafia braille para a língua portuguesa.
Segundo o artigo Grafia Braille para a Língua Portuguesa (2006), o sistema numérico os caracteres da 1ª série, precedidos do sinal # (3456), representam os algarismos de um a zero. Quando um número é formado por dois ou mais algarismos, só o primeiro é precedido deste sinal.
Conforme mostra na figura abaixo, as combinações de números.
Figura 07 – Combinações de números
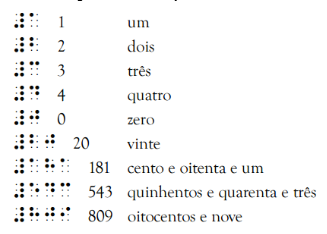
Fonte: Grafia braille para a língua portuguesa.
O sistema Braille possui 63 símbolos, neste artigo é colocado o que será utilizado (figura 09).
Figura 08 – Layout das vistas do projeto
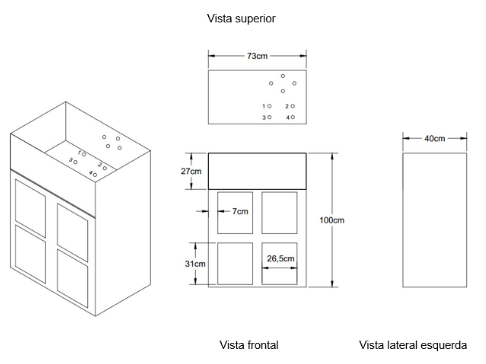
Fonte: Elaborado pelo autor (2025).
CONSIDERAÇÕES FINAIS
O projeto montado da sapateira para o deficiente visual, apresentou resultados satisfatórios e cumpriu as metas para organizar e identificar os calçados. E a montagem estão demonstradas nas figuras 09, 10 e 11.
Figura 09 – Botões do protótipo para reprodução e gravação de áudio
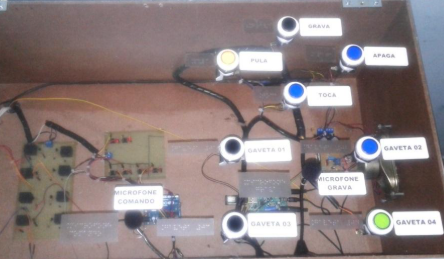
Fonte: Elaborado pelo autor (2025).
Figura 10 – Protótipo do organizador de calçados para cegos
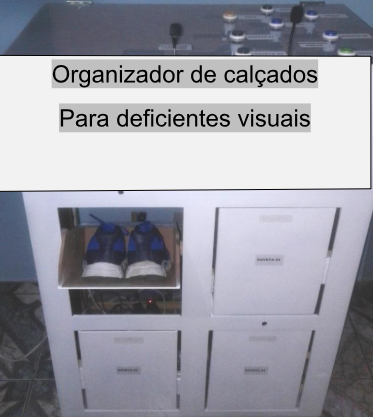
Fonte: Elaborado pelo autor (2025).
Figura 11 – Protótipo de organizador de calçados para deficientes visuais em 3D

Fonte: Elaborado pelo autor (2025).
Neste projeto pode-se pautar diversos tópicos de discussões sobre empreendedorismo, onde o projeto poderia ser levado até essas pessoas que possuem deficiências visuais visando concretizar melhorias na qualidade de vida de todas essas pessoas.
Também pode-se viabilizar o projeto economicamente para o mercado, ampliando as fronteiras de inovações voltadas para pessoas com necessidades especiais, esta ideia consiste em fazer com que o projeto seja reduzido, e compactado para que venha a se tornar um eletrodoméstico onde o consumidor final poderá ter em sua residência e assim escolher o calçado que tanto tem a vontade de usar.
Assim ficaria muito fácil e rápido para qualquer deficiente escolher como se calçar para sair, assim não perderá muito tempo com sua escolha, apenas pronunciará o calçado que queira e depois ele já é disposto em uma prateleira para a pessoa apenas pegar, seja ele algo mais casual, ou mais social. Isso certamente abrirá as fronteiras para ampliação dos negócios em tecnologias voltadas para pessoas deficientes visuais e outras pessoas com necessidades especiais. E através do comando de voz poderá fazer a vida do deficiente inclusiva e independente, e agregando valor a produção de tecnologia e empreendedorismo a favor de todos.
REFERÊNCIAS BIBLIOGRÁFICAS
BIRCH, Beverley. Louise Braille personagens que mudaram o mundo os grandes humanistas. Rio de Janeiro: Globo, 1990. p.64.
BARROS, Juliana Silva Lima; TELES, Ariel Salles; MEIRELES, Marinelma Costa et al. Tecnologias da informação e comunicação na Base Nacional Curricular Comum para o Ensino Fundamental: concepção dos professores de São José de Ribamar, Brasil. Research, Society and Development, v. 9, n. 7, 2020. Disponível em: https://solaris.ufnt.edu.br/server/api/core/bitstreams/665aae29-a094-4477-9281-8cc072008868/content. Acesso em: 15 de abril de 2025.
CERQUEIRA, Jonir Bechara. Ministério da Educação. Secretaria de Educação Especial. Grafia Braille para a Língua Portuguesa. Secretaria de Educação Especial. Brasília: SEESP, 2024.
Conforme a ABNT NBR 9050:2004 a um padrão para Letras e números – Dimensionamento (p. 24). História do Sistema braile. Disponível em: http://www.escoladecegositu.com.br/louis_braille.asp. Acesso em: 13 de março de 2024.
ÂNGULO, José Miguel Gil. Instituto Benjamin Constant Disponível em: www.ibc.gov.br. Acesso em: 10 de março de 2024.
ÂNGULO, José Miguel Gil. Máquina Perkins: definição, elementos e operação. Disponível em: http://agrega.educacion.es/repositorio/22052014/28/es_2014052212_9151631/la_mquina_perkins_definicin_elementos_y_funcionamiento.html. Acesso em: 15 de março de 2024.
RIBEIRO, Marcos Antônio. Fundamento da Automação. Automação: Conceitos, 1.ed. 2003. P. 01.
RIBEIRO, Marcos Antônio. Fundamento da Automação. Salvador: Tek Treinamento& Consultoria Ltda, 2003.
ROSÁRIO, João Maurício. Princípios de Mecatrônica. São Paulo: Editora Pearson
Prentice Hall, 2005.
SILVA, Anderson Gomes da. Reconhecimento de voz para palavras isoladas. 2009. Trabalho de Graduação (Bacharelado em Engenharia da Computação) – Centro de Informática, Universidade Federal de Pernambuco, Recife, 2009. Disponível em: http://docplayer.com.br/19253965-Reconhecimento-de-voz-para-palavras-isoladas.html. Acesso em: 14 de março de 2025.