INTRODUÇÃO
O presente trabalho tem como objetivo classificar e apresentar, com uma linguagem simples e direta, as diversas formas de medir e processar dados obtidos em campo utilizando equipamentos receptores GNSS. Esse estudo se mostra de grande importância nos dias atuais, especialmente em um cenário onde as novas gerações de agrimensores e cartógrafos frequentemente se formam sem acompanhar a totalidade da evolução tecnológica aplicada à medição de campo, muitas vezes sem compreender as diferenças ou os motivos que justificam a aplicação de técnicas específicas em determinadas situações.
A relevância do receptor GNSS na execução das atividades cotidianas de agrimensores e cartógrafos é amplamente reconhecida. Esses dispositivos, essenciais para a coleta de dados geoespaciais precisos, desempenham um papel central em áreas como construção civil, mapeamento, geodésia e agricultura de precisão. No entanto, a literatura brasileira sobre o tema ainda apresenta lacunas significativas, limitando o acesso a informações diretas e práticas sobre técnicas de coleta de dados associadas a esses equipamentos, especialmente para iniciantes ou profissionais que buscam aprimorar suas habilidades.
Alguns materiais existentes abordam, de fato, as técnicas de medição com o uso de GNSS, mas frequentemente o fazem de forma excessivamente técnica ou rebuscada, apresentando fórmulas complexas e conceitos avançados que acabam por desencorajar leitores menos experientes a explorar o tema com profundidade. Essa abordagem pode gerar incertezas entre profissionais e estudantes, levando a decisões inadequadas, erros no campo e até mesmo retrabalho que resulta em perda de tempo e recursos.
A tecnologia GNSS em si é composta por um conjunto de sistemas que utiliza sinais transmitidos por satélites em órbitas pré-determinadas. Esses sinais são captados por receptores em solo, permitindo a determinação precisa de localizações geográficas com base em técnicas de triangulação. Entretanto, a precisão desses sistemas pode ser influenciada por diversos fatores, como interferências atmosféricas (ionosfera e troposfera), reflexões multipercurso e erros associados aos relógios dos satélites e receptores.
Os profissionais que utilizam equipamentos GNSS devem compreender a diferença entre as fases dos sinais L1 e L2. Enquanto o sinal L1, de uso livre, é amplamente utilizado em dispositivos de navegação, a fase L2, mais precisa, é empregada principalmente em receptores geodésicos para aplicações que exigem alta acurácia. Além disso, as técnicas de correção diferencial, como a utilização de estações de referência, podem mitigar os erros inerentes ao sistema, garantindo maior confiabilidade nos resultados.
A escolha de uma técnica de medição ou do tipo de equipamento adequado deve considerar fatores como as características do projeto, o nível de precisão necessário e as condições ambientais. Uma abordagem prática e educativa na disseminação desse conhecimento é fundamental para capacitar novas gerações de profissionais, assegurando que estejam aptos a lidar com as demandas crescentes e complexas do mercado.
É essencial que a literatura e os materiais educativos sobre GNSS evoluam para atender, de forma acessível e prática, às necessidades tanto de iniciantes quanto de especialistas. A adequada compreensão das tecnologias e metodologias disponíveis pode transformar a eficiência das operações de campo e fortalecer o impacto da geotecnologia nas mais variadas áreas de aplicação.
SISTEMA DE LOCALIZAÇÃO GNSS
Entende-se como sistema GNSS o conjunto de equipamentos que se comunicam entre si: Emissores orbitais “Satélites”, segmento de controle de terra e receptores GNSS, conhecidos como “Equipamento GPS”.
Como já falei em outro artigo, o sistema de GPS, trata-se de “…, uma constelação de satélites, que circundam o planeta em órbitas pré-estabelecidas, de modo que qualquer aparelho em solo possa observar um mínimo de três emissores em órbita.” (Sachetti, 2025), esse sistema de localização, como observado à época, mostra-se simples, porém revolucionário, pois pela simples observação da diferença entre tempos de emissão e recepção de sinais com horários é possível se triangular e localizar-se em qualquer local do globo terrestre.
Observa-se ainda que o sistema GPS, conforme Rabbany “O resultado parcial do processamento do sinal consiste nas distâncias para os satélites GPS através dos códigos digitais (conhecidos como pseudoranges) e as coordenadas do satélite através da mensagem de navegação.” Esses sinais chegam até em dois módulos ou portadoras: O código C/A ou código de aquisição de curso, ou ainda conhecido como Fase L1, possui uso livre e gratuito e o Código P ou de precisão, conhecido ainda como Fase L2, que possui restrição de uso.
Temos então receptores GNSS que recebem apenas os sinais L1, e apenas convertem os mesmos em localização, que é o caso dos muito utilizados “GPS de navegação” ou ainda alguns modelos pouco utilizados atualmente de equipamentos receptores GNSS como o Stratus da empresa Sokkia, ou ainda o Epoch da empresa Trimble que recebem e processam suas localizações utilizando apenas o sinal da fase L1.
A fase L2, hoje é largamente utilizada em receptores geodésicos e existe uma grande gama de equipamentos disponíveis no mercado capazes de receber e codificar ambas as fases L1 e L2, obtendo grandes resultados posicionais.
Como percebe-se até aqui, as medições com receptor GNSS mostram-se simples, através da triangulação do sinal contendo as posições de três ou mais satélites é possível facilmente se localizar a posição do receptor em qualquer ponto do globo terrestre.
Essa técnica de medição porém, como apresentado por mim anteriormente, apresenta alguns erros e distorções:
Como já é de se imaginar após a leitura do parágrafo anterior, o sistema de localização por GPS possui falhas, muitas delas associadas a um atraso que ocorre no momento em que o sinal emitido pelo satélite atravessa a ionosfera ou a troposfera de nosso planeta, esse atraso, por menor que seja, acaba acarretando na diminuição da precisão da coordenada pois aumentam virtualmente a distância entre o receptor e o emissor, como já entendido acima. Outros problemas também são encontrados no momento da localização em solo como erro multicaminho no sinal do satélite, ruído de medição do receptor, erros de relógio de satélite-receptor ou ainda erros nas rotas dos satélites (Sachetti, 2025, p.7).
Esses problemas, muitas vezes, são corrigidos pelo próprio equipamento, um exemplo disso são os filtros de sinal implantados nos equipamentos, que impedem ou minimizam a recepção desses dados, ou ainda a eliminação dos dados recebidos à determinado ângulo. Porém outros erros sistêmicos no levantamento dessas informações posicionais não podem ser eliminados pelo próprio equipamento, como por exemplo, os fatores de atraso troposférico, uma vez que sua estimativa levaria em consideração dados climáticos locais e momentâneos, o que se mostraria muito complexo.
Quando se utiliza apenas um receptor GNSS, o principal desafio é a incapacidade de verificar a precisão da posição calculada. Isso ocorre porque o equipamento, trabalhando de forma isolada, não possui meios de diferenciar os erros sistemáticos, como os atrasos provocados pela ionosfera e troposfera, dos ruídos aleatórios que podem surgir durante a medição. Consequentemente, a posição fornecida pode ser menos confiável e apresentar desvios significativos.
Para superar essa limitação, surge a ideia de empregar dois receptores GNSS simultaneamente em um processo conhecido como técnica diferencial. Essa abordagem envolve a utilização de um receptor fixo, cuja posição é conhecida com alta precisão, e outro receptor móvel, que coleta os dados das posições a serem medidas. Ao comparar os dados recebidos por ambos, torna-se possível identificar e eliminar automaticamente os erros sistemáticos que afetam ambos os receptores de maneira semelhante. Assim, o cálculo resulta em uma posição muito mais precisa e confiável, reduzindo significativamente as incertezas inerentes às medições.
Rabbany (2002, p. 39), esclarece que os erros são comuns entre dois equipamentos ligados simultaneamente: “Isso ocorre principalmente porque as medições de dois (ou mais) receptores rastreando simultaneamente um satélite específico contêm mais ou menos os mesmos erros e vieses.” O autor também explica a observação da semelhança dos erros: “Quanto menor a distância entre os dois receptores, mais semelhantes os erros. Portanto, se tomarmos a diferença entre as medições dos dois receptores (daí o nome posicionamento diferencial), os erros semelhantes serão removidos ou reduzidos.” Este trecho do autor destaca a ideia de que, ao observar os erros do equipamento de referência e notar as mesmas incorreções, o software pode anulá-las, resultando apenas em erros próprios do equipamento.
Atualmente, essa técnica é amplamente reconhecida como a abordagem mais eficaz para minimizar os erros em medições realizadas com receptores GNSS. A prática envolve a utilização de um receptor fixo, estrategicamente posicionado em um local de coordenadas bem definidas, e outro receptor móvel, projetado para deslocar-se até o ponto onde se deseja realizar a medição. Ambos os receptores recebem simultaneamente os sinais emitidos pelos mesmos satélites, que, há de se imaginar, apresentam desvios e erros sistemáticos idênticos.
O grande diferencial dessa técnica está no processamento posterior dos dados coletados. Os softwares especializados conseguem identificar e corrigir matematicamente esses erros comuns entre ambos os receptores, eliminando-os das medições. Assim, os resultados finais apresentam uma precisão significativamente superior, com os únicos erros remanescentes sendo aqueles ocasionais, como falhas grosseiras de medição ou variações específicas de hardware e condições locais, em outras palavras, a técnica de processamento consiste em se isolar os erros que se repetem em ambos receptores, restando apenas os erros apresentados diretamente pelo levantamento.
Essa tecnologia é especialmente valiosa em aplicações que demandam altíssima precisão, como levantamentos geodésicos, planejamento urbano, engenharia civil e até mesmo em estudos ambientais. Além disso, a adoção crescente de soluções GNSS em diferentes setores reforça a relevância dessa técnica, visto que sua capacidade de oferecer dados confiáveis é uma necessidade primordial para atividades que dependem de coordenadas extremamente exatas.
O Método Relativo recebe esse nome porque a posição do receptor móvel (Rover) é calculada em relação à posição do receptor fixo (Base), que serve como referência confiável. Essa técnica é, por sua vez, subdividida em várias abordagens específicas, como o Método Relativo Estático, Método Relativo Estático Rápido, Método Relativo Cinemático, além do amplamente difundido Método Relativo Estático Rápido em Tempo Real, comumente conhecido pela sigla “RTK” (Real-Time Kinematic). O RTK, em particular, revolucionou a área de medições geodésicas, permitindo a transmissão de correções de posicionamento em tempo real, o que reduz significativamente o tempo de processamento de dados e aumenta a eficiência das operações.
Além disso, existe uma técnica alternativa que não requer o uso de um receptor fixo para corrigir os dados, muito popular em dispositivos como smartphones ou equipamentos portáteis de navegação, como os famosos aparelhos da marca Garmin. Esses dispositivos utilizam métodos baseados em cálculos autônomos, sem a necessidade de uma base fixa, e são amplamente empregados em situações onde a precisão milimétrica não é essencial, como trilhas, navegação terrestre e esportes ao ar livre.
Vale ressaltar que, apesar de sua utilidade prática, os métodos que não utilizam uma base fixa carecem da mesma precisão das técnicas diferenciais e são mais suscetíveis a erros causados por fatores atmosféricos, multicaminho e outros ruídos sistêmicos. Por outro lado, em aplicações que demandam extrema precisão, como levantamentos geodésicos, engenharia civil de alta complexidade e estudos ambientais detalhados, o Método Relativo com correções diferenciais continua sendo a escolha preferida.
Esse leque de opções reflete a flexibilidade dos sistemas GNSS modernos, que conseguem atender desde usuários casuais até profissionais que lidam com projetos de grande envergadura. A evolução constante dessas tecnologias reforça sua importância em um mundo cada vez mais dependente de dados geoespaciais confiáveis e precisos.
Como apresentado acima, existem várias maneiras de se obter a coordenada de um ponto, cada uma possui uma vantagem e uma fraqueza, a principal questão que fica é, qual a diferença entre elas e quando devo usar uma em detrimento de outra?
PROCESSAMENTO DE DADOS
Como observado anteriormente, o sistema de processamento de dados pelo método relativo é constituído de um aparelho fixo que serve como referência e outro móvel que faz a coleta das feições. Como também já entendido, essa técnica, através da eliminação dos erros comuns para os receptores é capaz de obter coordenadas milimetricamente precisas, porém sem uma maior certeza de sua acurácia.
A acurácia das coordenadas apresentadas em um levantamento é obtida pela técnica conhecida como Transporte de coordenadas e constitui-se de um processamento executado entre bases conhecidas e o ponto de referência do nosso trabalho.
No Brasil, o IBGE (Instituto Brasileiro de Geografia e Estatística) disponibiliza várias dessas bases espalhadas por todo o território brasileiro, um sistema conhecido como RBMC, Rede Brasileira de Monitoramento Contínuo, uma base RBMC constitui-se de um equipamento GNSS que permanece fixado em um mesmo lugar, com coordenadas já pré-estabelecidas, e faz o rastreio do sinal dos satélites 24 horas por dias, todos os dias. Esses dados ajustados, juntamente com suas precisões, são disponibilizados pelo órgão diariamente para download e utilização de seus dados para o processamento.
Com base nesses dados, o profissional deve efetuar a correção de seu ponto base, essa correção ocorre da mesma maneira que se faria para os pontos móveis, inserindo-se o arquivo do GNSS em um software de processamento, juntamente com as coordenadas e arquivos das bases RBMC, o sistema então fará a eliminação dos erros comuns aos levantamentos e apresentará uma coordenada precisa para o ponto.
Há de se salientar três pontos importantes nessa etapa:
Atualmente, muitos profissionais têm aberto mão deste processamento de base utilizando as bases RBMC e utilizado o sistema de Processamento por Ponto Preciso – PPP, também disponibilizado pelo IBGE. O PPP funciona de maneira autônoma, dispensando a necessidade de estações de referência fixas. Ele utiliza dados transmitidos pelos satélites GNSS juntamente com modelos matemáticos avançados para corrigir erros associados à órbita dos satélites, atrasos na atmosfera e outros fatores que afetam o sinal. Os dados coletados pelo receptor GNSS são processados em softwares especializados ou em plataformas online como a disponibilizada pelo IBGE, proporcionando uma solução prática e de alta precisão para determinar coordenadas geográficas em qualquer parte do território nacional.
Com as coordenadas do ponto de referência ajustadas e processadas com precisão, inicia-se a etapa de correção dos demais pontos coletados durante o levantamento. Esse procedimento é essencial para garantir a maior confiabilidade na construção de uma rede de pontos altamente precisa, que servirá como base para representar a feição estudada de forma detalhada.
É importante ressaltar que qualquer erro residual não eliminado durante o processamento inicial das bases RBMC, ou no uso do sistema PPP, pode se acumular ao longo dos cálculos dos pontos subsequentes. Esses erros cumulativos podem impactar diretamente na precisão final do trabalho, exigindo que os profissionais agrimensores ou cartógrafos estejam atentos à escolha das metodologias e ferramentas utilizadas. Adicionalmente, o uso de softwares avançados e a observação rigorosa das condições dos equipamentos GNSS são fatores que contribuem para minimizar essas discrepâncias.
Adotar boas práticas durante o levantamento, como garantir que os receptores estejam fixados em locais estratégicos e com excelente visibilidade dos satélites GNSS, bem como utilizar períodos de ocupação mais longos nas medições iniciais, são medidas que podem potencializar a qualidade do resultado final. Não menos importante é a análise criteriosa da geometria dos pontos, evitando configurações desfavoráveis que comprometam a eficiência e a precisão dos cálculos realizados.
MÉTODOS DE LEVANTAMENTO DE DADOS
Já foi destacado que existem diversas técnicas de levantamento de dados utilizando receptores GNSS, cada uma com suas particularidades, vantagens e limitações. A escolha do método mais adequado depende de fatores como a finalidade do trabalho, os recursos disponíveis e as condições do terreno. Por exemplo, enquanto o Processamento por Ponto Preciso (PPP) é amplamente utilizado por sua autonomia e alta precisão, ele pode ser limitado em áreas com cobertura de sinais GNSS reduzida. Já a utilização de múltiplas bases RBMC para triangulação, apesar de demandar um planejamento mais elaborado, é ideal para projetos que priorizam a eliminação de erros sistemáticos.
Métodos modernos, como a utilização de receptores multifrequência, têm ampliado as possibilidades, permitindo medições rápidas e confiáveis mesmo em ambientes urbanos, onde o sinal pode ser bloqueado por edifícios. Além disso, avanços nos modelos matemáticos e na integração com dados de correção atmosférica têm reduzido significativamente os erros residuais, garantindo resultados cada vez mais precisos.
Portanto, a avaliação criteriosa das ferramentas, métodos e condições do levantamento é essencial para o sucesso do projeto, reforçando a importância de uma abordagem técnica e fundamentada para cada cenário.
MEDIÇÕES COM RECEPTOR INDIVIDUAL NA FASE C/A
Os receptores que possuem capacidade de receberem e indicarem o posicionamento em tempo real através da banda C/A do sinal são conhecidos popularmente como gps de navegação, são equipamentos capazes de apresentar ao utilizados uma coordenada quase instantaneamente, sem necessidade de um segundo aparelho como referência ou ainda sem pós processamento. Esses aparelhos ainda hoje são utilizados por profissionais da área para medições onde não há a necessidade de alta precisão nas informações apresentadas.
No passado, as coordenadas obtidas por esses receptores apresentavam uma margem de erro considerável, superior a dez metros. Porém, com os avanços na tecnologia de recepção e processamento da banda C/A, essa imprecisão foi significativamente reduzida, atingindo atualmente uma precisão posicional em torno de três metros.
Embora essa técnica se destaque pela rapidez e praticidade no levantamento de dados, ela apresenta limitações na precisão. Por isso, seu uso é mais adequado em casos onde o grau de exatidão nas informações não é um requisito primordial. Assim, os GPS de navegação se consolidam como uma solução eficiente e acessível para demandas menos rigorosas no que diz respeito à precisão.
MÉTODO RELATIVO ESTÁTICO
Essa técnica consiste na aplicação de dois equipamentos, onde um dos equipamentos encontra-se em coordenadas conhecidas e serve como referência para um segundo. O segundo aparelho desloca-se até o ponto de interesse e permanece coletando os pontos parados, ou seja, estático, por determinado período de tempo. Segundo Rabbany (2002, p. 39): “Um receptor, o receptor base, é configurado sobre um ponto com coordenadas precisamente conhecidas, como um monumento de levantamento (às vezes chamado de ponto conhecido). O outro receptor, o receptor remoto, é configurado sobre um ponto cujas coordenadas são procuradas (às vezes chamado de ponto desconhecido)”.
De acordo com Rabbany (2002, p.39) “Um mínimo de quatro satélites comuns é necessário para posicionamento relativo. No entanto, rastrear mais de quatro satélites comuns simultaneamente melhorar a precisão da solução de posição do GPS”, é recomendado, no Brasil, a utilização de um número mínimo de seis satélites para se considerar um ponto com boa precisão posicional.
A questão central nessa técnica refere-se à distância entre os dois aparelhos, que deve ser cuidadosamente considerada para garantir a semelhança nos erros e na geometria dos satélites rastreados. Essa relação impacta diretamente o tempo necessário de ocupação, uma vez que, quanto maior a separação entre o equipamento base e o receptor móvel, maior será o período requerido para a coleta dos dados e a obtenção de resultados precisos. Além disso, fatores como as condições atmosféricas e possíveis interferências no sinal GNSS também devem ser avaliados, reforçando a importância de um planejamento criterioso para assegurar a confiabilidade das medições.
Segundo a Terceira Edição da Norma Técnica do INCRA para georreferenciamento de imóveis rurais, esse tempo deverá ser, no mínimo 20 minutos para linhas de visada com distância de até 10 quilômetros, com leituras que chegam a 60 minutos em distâncias entre 10 e 20 quilômetros para equipamentos em frequência L1 ou 30 Minutos para equipamentos em frequência L1/L2, conforme apresenta tabela:
Figura 1 – Tabela de tempos e precisões mínimas para georreferenciamento de imóveis rurais.
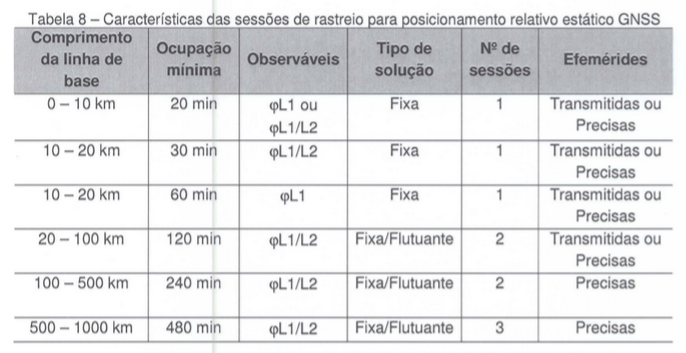
Fonte: 2º Norma Técnica para Certificação de Imóveis rurais – Incra
Essa técnica, conhecida como método relativo estático, é amplamente utilizada em aplicações que demandam alta precisão em medições geodésicas e topográficas. Seu princípio baseia-se na utilização de dois receptores GNSS (Sistema Global de Navegação por Satélite), sendo um posicionado em uma coordenada previamente conhecida – denominado estação base – e o outro deslocado para o ponto de interesse, onde permanece estático por um período específico para a coleta de dados.
A precisão alcançada com esse método depende diretamente do tempo de ocupação no ponto e da distância entre o receptor móvel e a estação base. Por exemplo, segundo as normas do INCRA para georreferenciamento de imóveis rurais, linhas de visada de até 10 quilômetros requerem no mínimo 20 minutos de ocupação para equipamentos que operam na frequência L1. Já para distâncias entre 10 e 20 quilômetros, as normas recomendam 60 minutos de coleta para equipamentos L1 e 30 minutos caso sejam utilizados equipamentos que operam nas frequências L1/L2.
Outro fator que contribui para a precisão dessa técnica é o pós-processamento dos dados. Após a coleta, as informações obtidas pelos dois receptores são comparadas, corrigindo erros provenientes de interferências atmosféricas, multipercurso e outros fatores. Esse procedimento é essencial para alcançar a precisão milimétrica que caracteriza o método relativo estático.
Essa abordagem é especialmente relevante em projetos que envolvem a delimitação de propriedades rurais, monitoramento de deformações em estruturas, estudos de recalque de solo e a criação de bases de dados geodésicos. Um exemplo prático dessa aplicação é a implantação de marcos geodésicos em áreas urbanas e rurais, servindo como referências para levantamentos futuros.
Embora o método relativo estático exija maior tempo e planejamento em comparação com outros métodos, como o RTK (Real Time Kinematic), sua confiabilidade e precisão tornam-no indispensável em situações que demandam excelência técnica. Assim, ele continua sendo uma ferramenta fundamental no arsenal de agrimensores, cartógrafos e engenheiros civis.
Rabbany (2002, p.40), conclui que “O levantamento estático de GPS com medições de fase portadora é a técnica de posicionamento mais precisa. Isso se deve principalmente à mudança significativa na geometria do satélite ao longo do longo período de observação.”
MÉTODO RELATIVO ESTÁTICO RÁPIDO
O método relativo estático rápido é uma variação simplificada do método relativo estático tradicional, que se destaca por requerer menor tempo de ocupação nos pontos de interesse, aplicada em situações que requerem muitas ocupações pelo receptor rover. Essa abordagem é especialmente útil em situações em que a precisão pode variar na casa dos centímetros, como no levantamento de marcos de divisas de propriedades, pontos geodésicos ou locais de difícil acesso ao sinal RTK.
A técnica envolve o uso simultâneo de dois equipamentos GNSS: um atuando como base de referência fixa, enquanto o outro, chamado de rover, é deslocado para os diversos pontos de interesse. Durante o levantamento, o rover pode ser desligado entre os pontos, não havendo necessidade de rastreamento contínuo. Os dados coletados são posteriormente processados, o que permite corrigir erros e alcançar os níveis de precisão desejados.
Após a coleta dos dados levantados em campo, os mesmos são transferidos do receptor para o computador que, através de softwares específicos fazem o processamento e ajustamento das coordenadas, como dito anteriormente, efetuando a comparação e a eliminação dos erros comuns para os dois.
O tempo de ocupação para o método relativo estático rápido varia conforme a distância entre o equipamento de base e o rover, bem como a capacidade técnica dos receptores utilizados. Para equipamentos que operam em dupla frequência (L1/L2), o tempo de ocupação pode variar entre 5 e 10 minutos por ponto. Já para equipamentos que operam somente na frequência L1, é recomendável um intervalo maior, entre 10 e 30 minutos por ponto. Entretanto, essa técnica apresenta limitações no que diz respeito à distância. Não é indicada para linhas superiores a 20 quilômetros de separação entre a base e o rover, devido à considerável perda de precisão além desse limite. Para distâncias superiores a 20 quilômetros, é recomendado o uso do método relativo estático tradicional, que oferece maior confiabilidade em medições de longo alcance.
Assim, o método relativo estático rápido é uma ferramenta valiosa para agrimensores e cartógrafos em levantamentos que exigem rapidez e eficiência, sem comprometer a qualidade das medições em distâncias moderadas.
MÉTODO RELATIVO SEMI CINEMÁTICO
Também conhecido como “stop and go”, necessita de dois aparelhos ligados ao mesmo tempo, consiste na implementação de um equipamento de referência, enquanto que o equipamento móvel faz as coletas.
Essa técnica requer que a geometria envolvida entre o equipamento base e o equipamento rover se altere, ou seja, o equipamento rover deve permanecer o tempo todo recebendo a coleta dos dados do satélite, parando em intervalos de 20 a 30 segundos para uma coleta de posição, que se apresenta em segundos, seguindo então para o próximo ponto. A trajetória entre os pontos de interesse não importa, porém o rastreio do sinal do satélite pelo equipamento rover deve ser contínua para que não se perca a sintonia do grupo de satélites rastreados.
Essa técnica apresenta a vantagem da produtividade, uma vez que as ocupações de seus pontos estão agora na casa dos segundos e não mais dos minutos, porém possui a desvantagem de que o equipamento rover não deve perder a sintonia do grupo de satélites que o mesmo recebe, o que pode comprometer a precisão do levantamento.
Após a inicialização, o rover se move para o primeiro ponto desconhecido. Após coletar cerca de 30 segundos de dados, o rover se move, sem ser desligado, para o segundo ponto e os procedimentos são repetidos. É de suma importância que pelo menos quatro satélites sejam rastreados, mesmo durante o movimento; caso contrário, o processo de inicialização deve ser repetido novamente, por exemplo, reocupando o ponto anterior. Alguns fabricantes, por exemplo, Ashtech Inc., recomendam a reocupação do primeiro ponto no final do levantamento (Rabbay, 2002, p. 13).
Uma variação desta técnica é conhecida como Levantamento Cinemático. Este método não requer paradas em pontos conhecidos, ao contrário do método semi-cinemático. No entanto, espera-se que as precisões obtidas sejam menores, uma vez que o método semi cinemático ou stop-and-go apresenta paradas para que os erros sejam calculados.
Na prática, essa técnica consiste em o equipamento GNSS rover coletar uma posição à um determinado intervalo de tempo, independente de estar parado ou não, porém, o mesmo só conseguirá identificar a primeira posição após o início do roteiro de medição, ou seja, o mesmo só obterá suas posições se houverem mudanças de posicionamento. Outra grande desvantagem dessa técnica é que o sinal não deve ser interrompido no percurso, como é de se imaginar lendo esse parágrafo, pois o caminhamento em caso de interrupção de sinal também é interrompido, levando, nesse caso, à criação de um segundo caminhamento no momento da reinicialização da recepção do sinal.
Para explicar melhor o que se pretende demonstrar aqui, como dito anteriormente, para melhores resultados dessa técnica, é correto se iniciar o caminhamento em determinado ponto e se retornar ao mesmo ponto inicial ao final do caminhamento, isso seria impossível após a interrupção do sinal do caminhamento, pois o sistema, quando interrompido o sinal, acaba criando um novo caminhamento.
Essa técnica encaixa-se perfeitamente, portanto, em áreas de pouca obstrução do céu, onde é possível se obter uma produtividade consideravelmente mais alta em relação às técnicas anteriores, porém em regiões de matas ou em áreas densamente povoadas essa técnica se mostra um grande problema, pois constantemente o sinal é interrompido por árvores, prédios, etc.
MÉTODO RELATIVO CINEMÁTICO EM TEMPO REAL – RTK
Talvez na atualidade a técnica que apresenta os melhores resultados em termos de produtividade e precisão, o Real Time Kinect, ou popularmente conhecido como RTK, é a técnica que, nos últimos anos, caiu nas graças da agrimensura e cartografia.
Esse método assemelha-se ao anterior, onde, um receptor de referência permanecem estacionários sobre um ponto conhecido, sendo conectado à um rádio transmissor – em quase todos também já implantado no próprio equipamento, podendo ser utilizado tanto o rádio externo como o interno do equipamento – o receptor rover que também leva embarcado consigo uma antena receptora de sinal de rádio interna.
Para o funcionamento dessa técnica se faz necessário um link de comunicação entre os dois rádios, com uma taxa de transmissão de dados alta, em torno de 1 Hz, onde as medições e coordenadas do equipamento base são transmitidas para o equipamento rover que, através de um software integrado, combina e processa as medições coletadas em ambos os receptores, fornecendo-as em tempo real para o usuário, ou seja, nenhum pós-processamento é necessário, e a precisão do posicionamento esperada é na ordem de 2 a 5 centímetros, sendo melhorada com paradas sobre o ponto desejado por um período curto de tempo – algo em torno de 30 segundos.
Como se imagina, os parâmetros de ambiguidades são determinados quase instantaneamente, através da técnica de resolução de ambiguidade conhecida como on-the-fly.
Uma das técnicas de resolução de ambiguidade “on-the-fly” (OTF) é a técnica dos filtros de Kalman. Nesse método, as medições realizadas pelo receptor base e pelo receptor móvel (rover) são combinadas utilizando o modo de dupla diferença, e um ajuste inicial é realizado. Esse ajuste pode ser feito por meio de técnicas como a filtragem de mínimos quadrados ou filtros de Kalman. O objetivo desse processo é determinar uma posição inicial para o rover, além de estimar os valores reais dos parâmetros de ambiguidade e seus respectivos níveis de incerteza, que são representados por uma matriz de covariância.
A matriz de covariância, por sua vez, pode ser visualizada de forma geométrica, gerando uma região chamada “região de confiança” ao redor dos parâmetros estimados. O tamanho dessa região de confiança é diretamente influenciado pelos níveis de incerteza nos parâmetros de ambiguidade e pelo nível de probabilidade definido. Quando os níveis de incerteza são elevados ou o nível de probabilidade escolhido é maior, a região de confiança se expande.
Geometricamente, essa região assume diferentes formas dependendo do número de parâmetros estimados. Por exemplo:
– Com dois parâmetros estimados, a região terá a forma de uma elipse;
– Com três parâmetros, será um elipsoide;
– Com mais de três parâmetros, como no caso de mais de quatro satélites rastreados, a região de confiança será representada por um hiperelipsoide.
Os parâmetros de ambiguidade são inicialmente determinados como parte da solução de mínimos quadrados, ou filtragem de Kalman, [2,3]. Infelizmente, no entanto, nenhum método pode determinar diretamente os números inteiros dos parâmetros de ambiguidade. O que pode ser obtido são os números de valor real junto com seus parâmetros de incerteza (a chamada matriz de covariância) apenas. Esses números de valor real são de fato difíceis de separar da solução de base [4]. Como tal, uma vez que sabemos de antemão que os parâmetros de ambiguidade são números inteiros, fica claro que uma análise mais aprofundada é necessária (Rabbay, 2002, p. 46).
A técnica RTK oferece uma enorme versatilidade. Ela pode ser aplicada em levantamentos topográficos, projetos de engenharia e até mesmo no monitoramento de estruturas em tempo real. Contudo, como toda tecnologia, o RTK tem suas limitações, como a necessidade de uma linha de visão clara entre o rover e o receptor base, bem como a dependência de uma boa cobertura de sinal de satélite.
Apesar dessas limitações, o RTK continua a ser uma ferramenta indispensável para profissionais que buscam aliar rapidez, precisão e confiabilidade em seus trabalhos, consolidando-se como uma das soluções mais avançadas no campo da geodésia e cartografia modernas.
Há de se salientar um ponto importante sobre essa técnica que é o sinal de rádio: em comparação com a técnica stop-and-go, a técnica do RTK apresenta melhores resultados quando se trata de perda de recepção de sinal da constelação GPS, uma vez que o processamento se dá pela coordenada obtida naquele momento.
Em outras palavras, lembrando o que foi dito acima, o sistema trata do envio, pelo equipamento de referência, das coordenadas corrigidas do mesmo, que são recebidas em campo pelo equipamento móvel, e envia ambas por meio de sinal de rádio, coordenada base e coordenada atual do rover para um dispositivo que faz o processamento e ajustamento das mesmas ali, em campo mesmo, em questão de segundos. Isso faz com que o equipamento não dependa de uma contínua recepção do sinal, nem da constelação GNSS nem da própria antena base, restaurando o processamento no exato momento em que esses dados tornam à serem recebidos, não causando maiores problemas ao usuário.
Talvez a grande falha nessa técnica se apresenta na interrupção do sinal de rádio à ser obtida pela antena rover, o que inibe de a mesma efetuar o processamento da coordenada atual, o que, algumas vezes, obriga ao usuário alternar em campo entre essa técnica e a medição por posicionamento estático rápido, acarretando em diminuição da produtividade da técnica.
Esse problema muitas vezes é melhor contornado no momento da escolha da posição do equipamento base, que deve ser implantado em local aberto, porém o sinal do mesmo deve ser espalhado por toda a área onde se vai levantar. Não adianta muito o profissional implantar a sua base no alto de um morro, que seja mais alto do que todos os outros na região, pois o sinal do emissor de rádio se perderá, não se espalhando e não sendo recebido. Da mesma maneira, implantar-se a base dentro de um vale ou um local com muitas obstruções acarretará no “envelopamento” do sinal, sendo refletido apenas naquele pequeno local.
O usuário dessa técnica, portanto, deve imaginar, no momento da implantação da base, que o sinal deverá ser emitido e muitas vezes deverá “ecoar” por toda a área de mensuração, sendo refletido para o equipamento receptor em todos os pontos à que se quer mensurar.
CONSIDERAÇÕES FINAIS
Após a leitura das páginas anteriores, o leitor percebe o tamanho do dinamismo que se apresenta a ferramenta receptor GNSS para o trabalho diário da cartografia/agrimensura.
Essa ferramenta hoje, evidentemente presente nos nossos bolsos, carros, aviões, também se apresenta oculta em medições para demarcação de rodovias, demarcações de bairros, na topografia para construção de casas, prédios, redes de esgoto, de água, ou em qualquer outra atividade da construção civil é fácil se perceber que ali, um dia, passou um topógrafo com um receptor GNSS na sua mão.
No entanto, torna-se evidente que a escolha da técnica apropriada para obter os dados em campo deve ser cuidadosamente planejada. Antes de iniciar os levantamentos, é imprescindível avaliar pontos de apoio e bases de referência, considerar distâncias envolvidas, bem como entender a topografia e as particularidades do terreno a ser mapeado. Para garantir resultados confiáveis, a técnica utilizada deve se alinhar à natureza do trabalho e à precisão exigida.
Por exemplo, quando se trata de determinar um ponto com altíssima precisão, é recomendável empregar a técnica de posicionamento estático ou “ponto preciso”. Essa abordagem permite alcançar precisão milimétrica, porém exige observações prolongadas da constelação GPS, frequentemente por várias horas, para obter dados de qualidade superior. Este tipo de técnica é adequado para situações onde a confiabilidade e a exatidão são inegociáveis, como em projetos de alta engenharia, levantamentos geodésicos ou monitoramento estrutural detalhado.
Por outro lado, uma vez estabelecido um ponto de referência com precisão elevada em um local, seria um desperdício de tempo e recursos utilizar a mesma técnica para medições extensivas, como no caso de grandes propriedades rurais ou levantamentos de áreas amplas. Nesse cenário, técnicas de posicionamento relativo, como o RTK (Real-Time Kinematic), são muito mais apropriadas. Essas técnicas permitem maior rapidez na coleta de dados, mantendo níveis de precisão aceitáveis para o tipo de tarefa em questão. Assim, é fundamental que se tenha clareza sobre os objetivos do levantamento para selecionar a metodologia que melhor se adapta às necessidades e ao custo-benefício do projeto.
Além disso, os receptores GNSS desempenham um papel essencial na otimização do trabalho. Com sua capacidade de integrar múltiplas constelações de satélites, como GPS, GLONASS, Galileo e BeiDou, os sistemas modernos oferecem maior cobertura e confiabilidade, mesmo em áreas desafiadoras, como vales profundos ou regiões urbanas densas. Este avanço tecnológico não apenas melhora a qualidade dos dados coletados, mas também amplia os horizontes de aplicação, consolidando o GNSS como uma ferramenta indispensável para profissionais que buscam aliar rapidez, precisão e confiabilidade em seus projetos.
Em suma, o uso estratégico e orientado das tecnologias GNSS não apenas facilita o trabalho dos profissionais de cartografia e agrimensura, mas também contribui para o progresso das infraestruturas modernas, reforçando sua posição como uma das soluções mais avançadas e versáteis no campo da geodésia e cartografia contemporâneas.
REFERÊNCIAS BIBLIOGRÁFICAS
INCRA. Manual Técnico para Georreferenciamento de Imóveis Rurais. 2ª ed. Brasília: Instituto Nacional de Colonização e Reforma Agrária, 2022.
MONICO, J. F. G., Posicionamento pelo NAVSTAR-GPS Descrição, fundamentos e aplicações. Presidente Prudente: Editora UNESP, 2000.
RABBANY, A, El. GPS: The Global Posicioning Sistem. Artech House, London, 2002.
XU, G. GPS: Theory, Algorithms and Applicatinons. 2ª ed. GeoForschungsZentrum Potsdam, Potsdam, Germany, 2007.